re-organise the pico flashing instructions
the instructions were a bit crap, for example it wasn't clear that you can get the firmawre pre-compiled in canoeboot releases. adapt it accordingly. Signed-off-by: Leah Rowe <leah@libreboot.org>master
parent
5c20fc539e
commit
bd0547db79
|
|
@ -44,6 +44,9 @@ is called *external* because it's not the *internal* one on your mainboard.
|
|||
Raspberry Pi Pico
|
||||
=================
|
||||
|
||||
RP2040/RP2530 both supported
|
||||
----------------------------
|
||||
|
||||
**Pico 2 and other RP2530 dongles also supported, on Canoeboot 20250107
|
||||
or higher. Releases before this only supported the original Pico, and other
|
||||
RP2040 dongles; newer Canoeboot releases now support both RP2040 and RP2530.**
|
||||
|
|
@ -60,30 +63,67 @@ Additionally, all the software running on it is free, down to the full
|
|||
versions (Pico W & Pico WH) need vendor firmware to use the Wi-Fi chip,
|
||||
but that is not needed for following this guide.
|
||||
|
||||
A Pico has proper 3.3V logic levels, unlike a ch341a. Which means it won't
|
||||
destroy your board by sending 5V to it. If you have a 1.8V flash chip,
|
||||
you need to add a logic level converter.
|
||||
Download serprog firmware pre-compiled
|
||||
-------------------------
|
||||
|
||||
Download the pico serprog tarball from Canoeboot releases. For example, the
|
||||
Canoeboot 20250107 one would be
|
||||
named: `canoeboot-20250107_pico_serprog.tar.xz` - it's available under
|
||||
the `roms/` directory in each release. With these binaries, you can easily
|
||||
get started.
|
||||
|
||||
Build serprog firmware from source
|
||||
----------------------------------
|
||||
|
||||
You can alternatively download the serprog firmware here:\
|
||||
<https://codeberg.org/libreboot/pico-serprog>\
|
||||
or here:\
|
||||
<https://notabug.org/libreboot/pico-serprog>
|
||||
|
||||
You can also find the source code for these, under `src/` in Canoeboot release
|
||||
archives (source code tarball), and/or under `src/` in `cbmk.git` if downloading
|
||||
using the build instructions below.
|
||||
|
||||
Alternatively to the binaries, you
|
||||
could build it yourself or you could also clone `cbmk.git` and [install build
|
||||
dependencies](../build/#first-install-build-dependencies), then inside cbmk,
|
||||
do:
|
||||
|
||||
./mk -b pico-serprog
|
||||
|
||||
This will automatically build the rpi-pico firmware, and the file will be
|
||||
at `bin/serprog_pico/serprog_pico.uf2`
|
||||
and `bin/serprog_pico/serprog_pico_w.uf2` - images with `pico2` in the
|
||||
file name are for the Pico 2, and they can also be used.
|
||||
|
||||
Install the serprog firmware
|
||||
----------------------------
|
||||
|
||||
First, connect just the Pico to your computer with a micro-USB cable.
|
||||
Mount it like any other USB flash drive. If it isn't detected, you might need
|
||||
to press the BOOTSEL button while you plug it in (this forces it into the
|
||||
bootloader mode).
|
||||
|
||||
You can also find the source code for these, under `src/` in Canoeboot release
|
||||
archives (source code tarball), and/or under `src/` in `cbmk.git` if downloading
|
||||
using the build instructions below.
|
||||
When you have the build, or if you're using a release build, copy the
|
||||
file `.uf2` file into your Pico. You must make sure to build the correct
|
||||
target, or otherwise copy the correct file, because many RP2040 and RP2530
|
||||
devices exist and Canoeboot provides images for **all of them** in the same
|
||||
release tarball.
|
||||
|
||||
Copy the file `rpi-pico-serprog.uf2` into your Pico. To build this firmware, you
|
||||
could build it yourself or you could also clone `cbmk.git` and [install build
|
||||
dependencies](..//build/#first-install-build-dependencies), then inside cbmk,
|
||||
do:
|
||||
**NOTE: Other RP2040/2530 devices will also work. You just have to match
|
||||
the right pins and use the correct firmware file!**
|
||||
|
||||
./mk -b pico-serprog
|
||||
Logic levels
|
||||
------------
|
||||
|
||||
This will automatically build the rpi-pico firmware, and the file will be
|
||||
at `bin/serprog_rp2040/serprog_pico.uf2`
|
||||
and `bin/serprog_rp2040/serprog_pico_w.uf2` - images with `pico2` in the
|
||||
file name are for the Pico 2, and they can also be used.
|
||||
A Pico has proper 3.3V logic levels, unlike a ch341a. Which means it won't
|
||||
destroy your board by sending 5V to it. If you have a 1.8V flash chip,
|
||||
you need to add a logic level converter. **Please ensure that you have matched
|
||||
the voltage of your programmer to the voltage of your chip; both the data lines
|
||||
and power lines to the chip must match.**
|
||||
|
||||
Wiring
|
||||
------
|
||||
|
||||
Disconnect the Pico and proceed to wire it to your
|
||||
[flash chip](/docs/install/spi.html#identify-which-flash-type-you-have).
|
||||
|
|
@ -97,6 +137,8 @@ above](https://av.canoeboot.org/rpi_pico/pinout_serprog.png)
|
|||

|
||||
|
||||
|
||||
|
||||
Headers were manually soldered on the top side, and the plastic packaging
|
||||
was repurposed as an insulating base. These might be nice to have, but by no
|
||||
means necessary. If your headers are on the other side, just keep in mind
|
||||
|
|
@ -107,7 +149,7 @@ will appear:
|
|||
|
||||
[453876.669019] cdc_acm 2-1.2:1.0: ttyACMx: USB ACM device
|
||||
|
||||
Take note of the ttyACMx. Flashrom is now usable
|
||||
Take note of the ttyACMx. Flashprog is now usable
|
||||
(substitute ttyACMx with what you observed earlier).
|
||||
|
||||
flashprog -p serprog:dev=/dev/ttyACMx,spispeed=16M
|
||||
|
|
@ -115,15 +157,7 @@ Take note of the ttyACMx. Flashrom is now usable
|
|||
spispeed=32M usually works, but since it's not much faster it's probably
|
||||
not worth it. The 12Mbps USB port is limiting the actual speed here.
|
||||
|
||||
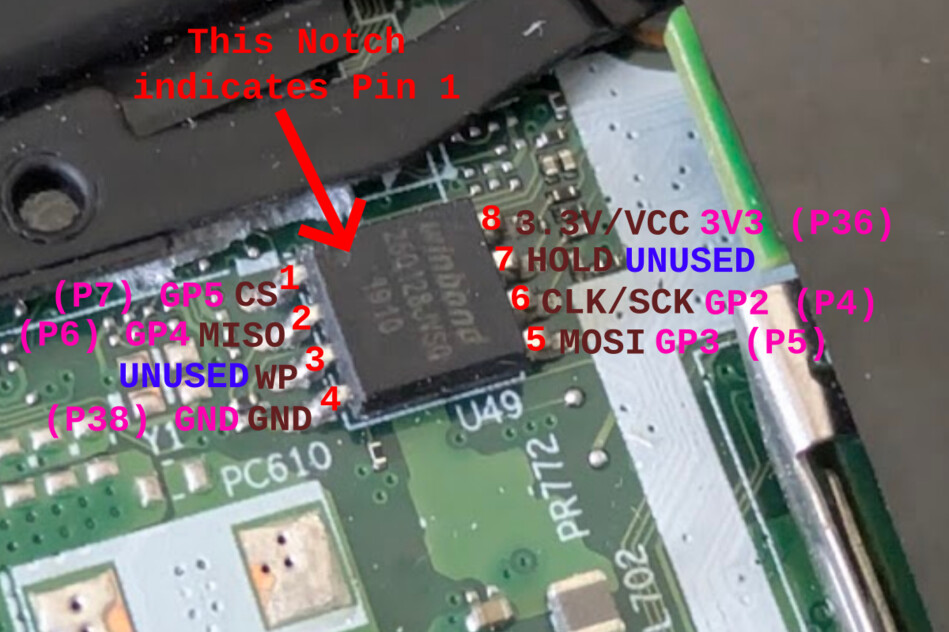
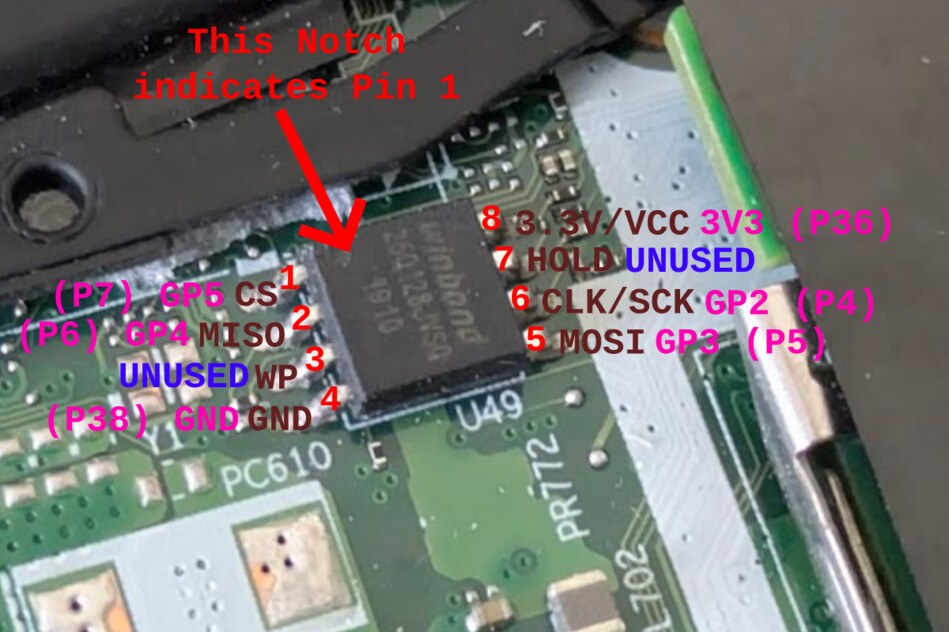
Raspberry Pi Pico SOIC-8 wiring
|
||||
-------------------------------
|
||||
|
||||
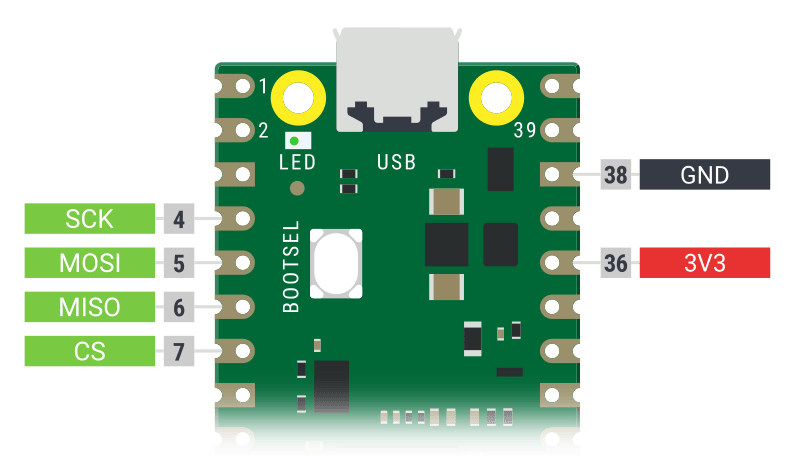
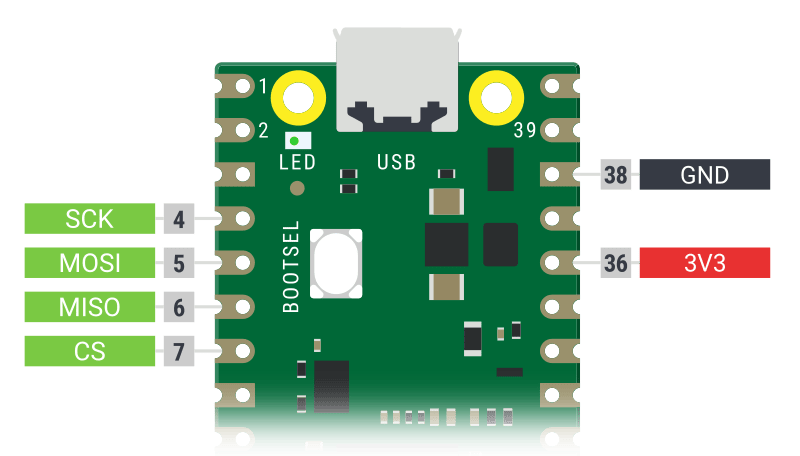
When using a Raspberry Pi Pico to program a SOIC-8 flash chip with
|
||||
`pico-serprog`, you may use the following diagram, which contains the
|
||||
Raspberry Pi Pins and the pinouts of the typical SOIC-8 chip to wire up
|
||||
your programmer:
|
||||
|
||||
|
||||
Higher speeds might work nicely, on Pico 2.
|
||||
|
||||
Do not use CH341A!
|
||||
==================
|
||||
|
|
@ -497,7 +531,7 @@ at <https://flashprog.org/>
|
|||
|
||||
If you're flashing a Macronix flashchip on a ThinkPad X200, you will want to
|
||||
use a special patched version of flashprog, which you can download like so
|
||||
in lbmk:
|
||||
in cbmk:
|
||||
|
||||
./mk -b flashprog
|
||||
|
||||
|
|
|
|||
|
|
@ -25,6 +25,9 @@ canoeboot 目前记录了这些 SPI 编程器的使用方法:
|
|||
Raspberry Pi Pico
|
||||
=================
|
||||
|
||||
RP2040/RP2530 both supported
|
||||
----------------------------
|
||||
|
||||
**Pico 2 and other RP2530 dongles also supported, on Canoeboot 20250107
|
||||
or higher. Releases before this only supported the original Pico, and other
|
||||
RP2040 dongles; newer Canoeboot releases now support both RP2040 and RP2530.**
|
||||
|
|
@ -41,33 +44,81 @@ Additionally, all the software running on it is free, down to the full
|
|||
versions (Pico W & Pico WH) need vendor firmware to use the Wi-Fi chip,
|
||||
but that is not needed for following this guide.
|
||||
|
||||
A Pico has proper 3.3V logic levels, unlike a ch341a. Which means it won't
|
||||
destroy your board by sending 5V to it. If you have a 1.8V flash chip,
|
||||
you need to add a logic level converter.
|
||||
Download serprog firmware pre-compiled
|
||||
-------------------------
|
||||
|
||||
Download the pico serprog tarball from Canoeboot releases. For example, the
|
||||
Canoeboot 20250107 one would be
|
||||
named: `canoeboot-20250107_pico_serprog.tar.xz` - it's available under
|
||||
the `roms/` directory in each release. With these binaries, you can easily
|
||||
get started.
|
||||
|
||||
Build serprog firmware from source
|
||||
----------------------------------
|
||||
|
||||
You can alternatively download the serprog firmware here:\
|
||||
<https://codeberg.org/libreboot/pico-serprog>\
|
||||
or here:\
|
||||
<https://notabug.org/libreboot/pico-serprog>
|
||||
|
||||
You can also find the source code for these, under `src/` in Canoeboot release
|
||||
archives (source code tarball), and/or under `src/` in `cbmk.git` if downloading
|
||||
using the build instructions below.
|
||||
|
||||
Alternatively to the binaries, you
|
||||
could build it yourself or you could also clone `cbmk.git` and [install build
|
||||
dependencies](../build/#first-install-build-dependencies), then inside cbmk,
|
||||
do:
|
||||
|
||||
./mk -b pico-serprog
|
||||
|
||||
This will automatically build the rpi-pico firmware, and the file will be
|
||||
at `bin/serprog_pico/serprog_pico.uf2`
|
||||
and `bin/serprog_pico/serprog_pico_w.uf2` - images with `pico2` in the
|
||||
file name are for the Pico 2, and they can also be used.
|
||||
|
||||
Install the serprog firmware
|
||||
----------------------------
|
||||
|
||||
First, connect just the Pico to your computer with a micro-USB cable.
|
||||
Mount it like any other USB flash drive. If it isn't detected, you might need
|
||||
to press the BOOTSEL button while you plug it in (this forces it into the
|
||||
bootloader mode).
|
||||
|
||||
Copy the relevant `.uf2` file into your Pico. To build this firmware, you
|
||||
could build it yourself or you could also clone `cbmk.git` and [install build
|
||||
dependencies](..//build/#first-install-build-dependencies), then inside cbmk,
|
||||
do:
|
||||
When you have the build, or if you're using a release build, copy the
|
||||
file `.uf2` file into your Pico. You must make sure to build the correct
|
||||
target, or otherwise copy the correct file, because many RP2040 and RP2530
|
||||
devices exist and Canoeboot provides images for **all of them** in the same
|
||||
release tarball.
|
||||
|
||||
./mk -b pico-serprog
|
||||
**NOTE: Other RP2040/2530 devices will also work. You just have to match
|
||||
the right pins and use the correct firmware file!**
|
||||
|
||||
This will automatically build the rpi-pico firmware, and the file will be
|
||||
at `bin/serprog_rp2040/serprog_pico.uf2`
|
||||
and `bin/serprog_rp2040/serprog_pico_w.uf2` - images with `pico2` in the
|
||||
file name are for the Pico 2, and they can also be used.
|
||||
Logic levels
|
||||
------------
|
||||
|
||||
A Pico has proper 3.3V logic levels, unlike a ch341a. Which means it won't
|
||||
destroy your board by sending 5V to it. If you have a 1.8V flash chip,
|
||||
you need to add a logic level converter. **Please ensure that you have matched
|
||||
the voltage of your programmer to the voltage of your chip; both the data lines
|
||||
and power lines to the chip must match.**
|
||||
|
||||
Wiring
|
||||
------
|
||||
|
||||
Disconnect the Pico and proceed to wire it to your
|
||||
[flash chip](/docs/install/spi.html#identify-which-flash-type-you-have).
|
||||
|
||||
|
||||
**NOTE: SCK and CLK mean the same thing. The diagram below says SCK, and other
|
||||
parts of this guide say CLK. It's the same thing!**
|
||||
|
||||

|
||||
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
Headers were manually soldered on the top side, and the plastic packaging
|
||||
was repurposed as an insulating base. These might be nice to have, but by no
|
||||
|
|
@ -87,6 +138,8 @@ Take note of the ttyACMx. Flashprog is now usable
|
|||
spispeed=32M usually works, but since it's not much faster it's probably
|
||||
not worth it. The 12Mbps USB port is limiting the actual speed here.
|
||||
|
||||
Higher speeds might work nicely, on Pico 2.
|
||||
|
||||
不要使用 CH341A!
|
||||
==================
|
||||
|
||||
|
|
|
|||
Loading…
Reference in New Issue