parent
be8cd2d2e0
commit
c5c3cc6580
|
|
@ -6,8 +6,8 @@ x-toc-enable: true
|
|||
The main purpose of this article is to describe how the Canoeboot project
|
||||
operates, why it exists and what it does. Who, what, why and when.
|
||||
|
||||
What is Canoeboot?
|
||||
===================
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------
|
||||
|
||||
Canoeboot is free/libre boot firmware based on [Libreboot](https://libreboot.org/) (which is in turn
|
||||
based on coreboot), replacing proprietary BIOS/UEFI firmware on select x86/ARM
|
||||
|
|
@ -25,8 +25,7 @@ same way that *Debian* is a Linux distro. Similar projects now exist, today,
|
|||
inspired by Libreboot's example. Coreboot is notoriously difficult to configure and install
|
||||
for most non-technical users, but Libreboot and Canoeboot make it easier.
|
||||
|
||||
How does Canoeboot compare to Libreboot?
|
||||
-------------------
|
||||
### How does Canoeboot compare to Libreboot?
|
||||
|
||||
More specifically, Canoeboot is a *fork* of Libreboot, maintained in parallel
|
||||
as per each Libreboot release; Canoeboot maintains
|
||||
|
|
@ -105,8 +104,7 @@ at all times, usually making releases on the exact same day. When a
|
|||
Libreboot release comes out, Canoeboot usually also does a corresponding
|
||||
release on the same day, or the day after.
|
||||
|
||||
Who?
|
||||
------
|
||||
### Who?
|
||||
|
||||
Canoeboot is maintained by the same founder, Leah Rowe, who is the founder and
|
||||
lead developer of both the Libreboot project *and* the Canoeboot project.
|
||||
|
|
@ -116,8 +114,7 @@ a handful of mainboards from coreboot, and sometimes
|
|||
several [mitigations](https://browse.libreboot.org/lbmk.git/plain/resources/coreboot/default/patches/0012-fix-speedstep-on-x200-t400-Revert-cpu-intel-model_10.patch?id=9938fa14b1bf54db37c0c18bdfec051cae41448e)
|
||||
may be required to stabilise certain functionalities under these conditions.
|
||||
|
||||
Release schedule
|
||||
--------------
|
||||
### Release schedule
|
||||
|
||||
The Canoeboot schedule is: whenever a Libreboot release is ready, produce a
|
||||
new Canoeboot release based on it, when there are enough changes to warrant a
|
||||
|
|
@ -128,8 +125,7 @@ of Libreboot. Development is done mainly on Libreboot, and ported over to
|
|||
Canoeboot periodically; any work that isn't suitable for Canoeboot (such as
|
||||
scripts for handling binary blobs) are *not* ported over to Canoeboot.
|
||||
|
||||
How releases are engineered
|
||||
-----------------
|
||||
### How releases are engineered
|
||||
|
||||
It's actually very simple. Here is the method by which Canoeboot releases are
|
||||
created:
|
||||
|
|
|
|||
|
|
@ -4,13 +4,13 @@ x-toc-enable: true
|
|||
...
|
||||
|
||||
User support
|
||||
============
|
||||
------------
|
||||
|
||||
IRC oder Reddit werden bevorzugt, sofern Du eine Support Anfrage hast (IRC empfohlen).
|
||||
Für Informationen bzgl. IRC and Reddit siehe unten.
|
||||
|
||||
Entwicklungs Diskussion
|
||||
======================
|
||||
---------------------
|
||||
|
||||
Eine Mailing Liste ist für die Zukunft in Planung. Bis dahin, siehe unter
|
||||
[der Git Seite](git.md) für Informationen wie Du dich an der Entwicklung beteiligen kannst.
|
||||
|
|
@ -18,7 +18,7 @@ Eine Mailing Liste ist für die Zukunft in Planung. Bis dahin, siehe unter
|
|||
Hier finden sich ebenso Anleitungen zum Senden von Patches (via Pull-Requests).
|
||||
|
||||
IRC Chatraum
|
||||
============
|
||||
-------------
|
||||
|
||||
IRC ist hauptsächlich der Weg um Kontakt Canoeboot Projekt aufzunehmen. `#canoeboot` auf Libera
|
||||
IRC.
|
||||
|
|
@ -49,12 +49,11 @@ Website erläutern wie dies funktioniert:
|
|||
Grundsätzlich solltest Du die Dokumentation der von Dir verwendeten IRC Software konsultieren.
|
||||
|
||||
Soziale Medien
|
||||
============
|
||||
-----------------
|
||||
|
||||
Canoeboot existiert offiziell an vielen Orten.
|
||||
|
||||
Mastodon
|
||||
--------
|
||||
### Mastodon
|
||||
|
||||
Gründerin und Haupt-Entwicklerin, Leah Rowe, ist auf Mastodon:
|
||||
|
||||
|
|
@ -63,8 +62,7 @@ Gründerin und Haupt-Entwicklerin, Leah Rowe, ist auf Mastodon:
|
|||
Leah kann zudem unter dieser eMail kontaktiert werden:
|
||||
[leah@libreboot.org](mailto:leah@libreboot.org)
|
||||
|
||||
Reddit
|
||||
------
|
||||
### Reddit
|
||||
|
||||
Hauptsächlich verwendet als Support Kanal und für Veröffentlichung von Neuigkeiten:
|
||||
<https://www.reddit.com/r/canoeboot/>
|
||||
|
|
|
|||
|
|
@ -4,19 +4,19 @@ x-toc-enable: true
|
|||
...
|
||||
|
||||
Supporto utenti
|
||||
===============
|
||||
---------------
|
||||
|
||||
IRC o Reddit sono consigliati, sebbene preferiamo che usi il canale IRC
|
||||
per avere o per offrire supporto tecnico. Continua a leggere per avere
|
||||
ulteriori informazioni.
|
||||
|
||||
Mailing list
|
||||
============
|
||||
------------
|
||||
|
||||
No mailing lists at present.
|
||||
|
||||
Discussione sullo sviluppo
|
||||
==========================
|
||||
--------------------------
|
||||
|
||||
Per ora dai un occhiata sulla
|
||||
[pagina Git](git.md) per avere maggiori informazioni su come puoi
|
||||
|
|
@ -26,7 +26,7 @@ Su quella stessa pagina puoi trovare informazioni su come inviare
|
|||
correzioni (patches) tramite pull requests.
|
||||
|
||||
Canale IRC
|
||||
==========
|
||||
----------
|
||||
|
||||
IRC e' il modo principale per contattare chi collabora con il progetto Canoeboot.
|
||||
Il canale ufficiale e' `#canoeboot` su Libera IRC.
|
||||
|
|
@ -56,19 +56,22 @@ di Libera spiegano come:
|
|||
Comunque dovresti sempre controllare la documentazione del tuo client IRC preferito.
|
||||
|
||||
Reti sociali online
|
||||
===================
|
||||
-------------------
|
||||
|
||||
Canoeboot esiste ufficialmente in molte piattaforme.
|
||||
|
||||
Mastodon
|
||||
--------
|
||||
### Mastodon
|
||||
|
||||
Il fondatore e sviluppatore principale, Leah Rowe, e' su Mastodon:
|
||||
|
||||
* <https://mas.to/@libreleah>
|
||||
|
||||
Posta elettronica
|
||||
-----------------
|
||||
### Posta elettronica
|
||||
|
||||
Leah puo' essere contattata anche via email a questo indirizzo:
|
||||
[leah@libreboot.org](mailto:leah@libreboot.org)
|
||||
|
||||
### Reddit
|
||||
|
||||
Usato principalmente come canale di supporto e per annunciare notizie:
|
||||
<https://www.reddit.com/r/canoeboot/>
|
||||
|
|
|
|||
|
|
@ -3,16 +3,14 @@ title: Contact
|
|||
x-toc-enable: true
|
||||
...
|
||||
|
||||
**TODO: mailing lists, mastodon server and peertube account.**
|
||||
|
||||
User support
|
||||
============
|
||||
-------------
|
||||
|
||||
IRC or Reddit are recommended, if you wish to ask for support (IRC recommended).
|
||||
See below for information about IRC and Reddit.
|
||||
|
||||
Development discussion
|
||||
======================
|
||||
--------------------
|
||||
|
||||
Mailing lists are planned for the future. For now, see notes
|
||||
on [the Git page](git.md) for information about how to assist with development.
|
||||
|
|
@ -20,7 +18,7 @@ on [the Git page](git.md) for information about how to assist with development.
|
|||
Instructions are also on that page for sending patches (via pull requests).
|
||||
|
||||
IRC chatroom
|
||||
============
|
||||
-------------
|
||||
|
||||
IRC is the main way to contact the Canoeboot project. `#canoeboot` on Libera
|
||||
IRC.
|
||||
|
|
@ -51,12 +49,11 @@ website tells you how:
|
|||
In general, you should check the documentation provided by your IRC software.
|
||||
|
||||
Social media
|
||||
============
|
||||
-------------
|
||||
|
||||
Canoeboot exists officially on many places.
|
||||
|
||||
Mastodon
|
||||
--------
|
||||
### Mastodon
|
||||
|
||||
The founder and lead developer, Leah Rowe, is on Mastodon:
|
||||
|
||||
|
|
@ -65,8 +62,7 @@ The founder and lead developer, Leah Rowe, is on Mastodon:
|
|||
Leah can also be contacted by this email address:
|
||||
[leah@libreboot.org](mailto:leah@libreboot.org)
|
||||
|
||||
Reddit
|
||||
------
|
||||
### Reddit
|
||||
|
||||
Mostly used as a support channel, and also for news announcements:
|
||||
<https://www.reddit.com/r/canoeboot/>
|
||||
|
|
|
|||
|
|
@ -3,16 +3,14 @@ title: Зв'язок
|
|||
x-toc-enable: true
|
||||
...
|
||||
|
||||
**TODO: списки розсилки, сервер mastodon та обліковий запис peertube.**
|
||||
|
||||
Підтримка користувачів
|
||||
============
|
||||
----------------------
|
||||
|
||||
IRC або Reddit рекомендовані, якщо ви бажаєте попросити про допомогу (найкраще IRC).
|
||||
Дивіться інформацію нижче щодо IRC та Reddit.
|
||||
|
||||
Обговорення розробки
|
||||
======================
|
||||
--------------------
|
||||
|
||||
Списки розсилки плануються на майбутнє. Зараз, подивіться нотатки
|
||||
на [сторінці Git](git.md) для інформації щодо допомоги з розробкою.
|
||||
|
|
@ -20,7 +18,7 @@ IRC або Reddit рекомендовані, якщо ви бажаєте по
|
|||
На цій сторінці також знаходяться інструкції по відправці патчів (через pull request'и).
|
||||
|
||||
Кімната IRC
|
||||
============
|
||||
-----------
|
||||
|
||||
IRC це головний спосіб зв'язку з проектом Canoeboot. `#canoeboot` на Libera
|
||||
IRC.
|
||||
|
|
@ -51,12 +49,11 @@ Libera є однією з найбільших мереж IRC, використ
|
|||
Взагалі, вам варто перевірити документацію, яка передбачена вашою програмою IRC.
|
||||
|
||||
Соціальні мережі
|
||||
============
|
||||
----------------
|
||||
|
||||
Canoeboot офіційно існує в багатьох місцях.
|
||||
|
||||
Mastodon
|
||||
--------------------
|
||||
### Mastodon
|
||||
|
||||
Засновник та головний розробник, Лія Роу, є в Mastodon:
|
||||
|
||||
|
|
@ -65,8 +62,7 @@ Mastodon
|
|||
Також можливо зв'язатися з Лією за ії електронною адресою:
|
||||
[leah@libreboot.org](mailto:leah@libreboot.org)
|
||||
|
||||
Reddit
|
||||
------
|
||||
### Reddit
|
||||
|
||||
Найбільше використовується як канал підтримки, та також для оголошення новин:
|
||||
<https://www.reddit.com/r/canoeboot/>
|
||||
|
|
|
|||
|
|
@ -9,4 +9,3 @@ and lead developer for *both* projects; Leah maintains both
|
|||
Canoeboot *and* Libreboot.
|
||||
|
||||
If you have a patch, or beef, talk to Leah.
|
||||
|
||||
|
|
|
|||
|
|
@ -1,26 +1,120 @@
|
|||
---
|
||||
title: BSD operating systems
|
||||
title: Install a BSD operating system on Canoeboot
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Guide last updated on 16 November 2022.
|
||||
It is assumed here that you are using the *SeaBIOS* payload, *not* the GRUB
|
||||
payload; the U-Boot payload may also work, but that is not covered here. The
|
||||
SeaBIOS payload must ideally run in text mode (`txtmode` images from Canoeboot
|
||||
releases).
|
||||
|
||||
NOTE: This guide pertains to x86 hosts, and does not cover supported CrOS/ARM
|
||||
chromebooks. For ARM targets, you should refer to u-boot documentation.
|
||||
This guide pertains to x86 hosts, and does not cover supported CrOS/ARM
|
||||
chromebooks. For ARM targets, you should refer to [u-boot
|
||||
documentation](../uboot/) - and [U-Boot x86](../uboot/uboot-x86.md) is also
|
||||
available. The U-Boot x86 payload is interesting, because it can in fact boot
|
||||
OpenBSD via UEFI method (U-Boot provides a lightweight UEFI implementation
|
||||
independently of, say, EDK2).
|
||||
|
||||
Canoeboot is capable of booting many BSD systems. This section mostly documents
|
||||
the peculiarities of Canoeboot as it pertains to BSD; you can otherwise refer to
|
||||
the official documentation for whatever BSD system you would like to use.
|
||||
What is BSD?
|
||||
------------
|
||||
|
||||
Kernel Mode Setting
|
||||
===================
|
||||
In our context, we are referring to those descendents of 4.4BSD-Lite starting
|
||||
in the early 1990s. On balance, they are about equal to Linux in many ways,
|
||||
and some would argue that they are *better* (higher code quality). It can be
|
||||
said that the BSDs are the closest we have to *true* open source Unix systems,
|
||||
since they ultimately descend from that code lineage. For example, the
|
||||
FreeBSD project briefly covers its own history in the Hand Book:
|
||||
<https://docs.freebsd.org/en/books/handbook/introduction/#history>
|
||||
|
||||
Chief among them are:
|
||||
|
||||
* [FreeBSD](https://www.freebsd.org/) (HardenedBSD probably also works)
|
||||
* [NetBSD](https://netbsd.org/)
|
||||
* [OpenBSD](https://www.openbsd.org/)
|
||||
* [DragonFlyBSD](https://www.dragonflybsd.org/) (UNTESTED)
|
||||
|
||||
**TODO: DragonFlyBSD is untested, as of January 2025. It ought to be tested.**
|
||||
|
||||
Many other BSD systems exist, that are largely derived from these.
|
||||
|
||||
Why use BSD (instead of Linux)?
|
||||
-------------------------------
|
||||
|
||||
BSD operating systems are in wide use today, powering much of the world's
|
||||
most critical infrastructure, and they're quite competent laptop/desktop or
|
||||
workstation systems. Some of them have unique features that you can't find
|
||||
anywhere else (e.g. FreeBSD jails, OpenBSD's numerous security enhancements,
|
||||
NetBSD's rump kernel design and clean code quality).
|
||||
|
||||
BSD systems are superfically similar to Linux systems, but they are very
|
||||
different under the hood (different kernel designs, different userspace
|
||||
implementations, and so on). However, almost all of the Linux userspace programs
|
||||
that you enjoy using are probably available in the various BSD *ports trees*,
|
||||
or they can be compiled with little to no modification. This is because, despite
|
||||
the actual differences under the hood, the BSDs and various Linux distros all
|
||||
adhere to the same basic standards (e.g. Single Unix Specification).
|
||||
|
||||
If you want to enjoy using a high quality operating system, with many unique
|
||||
features, BSD systems can be quite fun to use, and quite challenging. They tend
|
||||
to have a much more conservative take on implementations, compared to Linux
|
||||
distros, instead opting for technical correctness and minimalism; this is a
|
||||
good thing, because lots of Linux distros these days are extremely bloated.
|
||||
Using a BSD system feels like Linux did in the year 2005, just with much better
|
||||
hardware support, and that's a *good thing*; the reason why is that BSD systems
|
||||
simply have fewer users, and a higher concentration of *technical* users, and
|
||||
this *shows* when you use it. Linux is *much* more mass market and has to cater
|
||||
to all sorts of people, and these days Linux distros have to *Just Work*.
|
||||
|
||||
You can look at the documentation of each BSD system and try each one out, to
|
||||
see which one is right for you. Be warned, BSD systems *are* typically harder
|
||||
to use than Linux systems. Even the most seasoned Linux user will often have a
|
||||
hard time with any BSD, if it's their first time using a BSD system. This is
|
||||
mitigated by excellent documentation, which is one of the things that the BSDs
|
||||
excel at, but you are expected to *read* the documentation; many Linux distros
|
||||
try to hold your hand ("it Just Works"), but the BSDs generally don't do that.
|
||||
|
||||
If you're already a power user on Linux, and comfortable with the more hands-on
|
||||
distros like Arch Linux or Gentoo Linux, you'll have a much easier time
|
||||
learning a BSD. FreeBSD for example comes completely barebones by default, and
|
||||
you add packages to it, configuring it to your liking, much like Arch Linux; if
|
||||
you're wily enough, you might also use the CURRENT tree and install all packages
|
||||
by building them from *ports* (akin to how Gentoo Linux is used).
|
||||
|
||||
BSD systems also have much more relaxed licensing than Linux systems, by and
|
||||
large; most of the software in the base system, on any BSD project, will use
|
||||
a permissive license instead of copyleft. They can be regarded as Free Software,
|
||||
but it's a very different ideology than, say, GNU. Some might argue that this
|
||||
is better, because licensing conflicts are common among copyleft licenses, even
|
||||
among different versions of the GPL. A BSD-style license permits *anyone* to
|
||||
use the code, *without* requiring modified versions to ship source code, so it
|
||||
can be said that the BSD license model contains [far fewer
|
||||
restrictions](https://docs.freebsd.org/en/articles/bsdl-gpl/). One might say
|
||||
that the BSD systems are *more free* than GNU/Linux systems.
|
||||
|
||||
Basically, your choice to use BSD will likely be based on a combination of
|
||||
technical and/or ideological preferences. But don't say we didn't warn you.
|
||||
BSD is hard. On the flip side of that coin, BSD is *easy*, because it forces
|
||||
you to really learn how your system works; when you become proficient with
|
||||
BSD, you'll learn everything else much easier, and you may find yourself doing
|
||||
things more efficiently *in Linux* as well!
|
||||
|
||||
That's enough BSD fanaticism. Please read the following sections, *before*
|
||||
you embark on your BSD Canoeboot journey:
|
||||
|
||||
Common issues with BSD+Canoeboot
|
||||
--------------------------------
|
||||
|
||||
This page will not tell you how to install BSD systems; that is best left to
|
||||
the documentation for your BSD system. Instead, these next sections cover only
|
||||
the idiosyncrasies of Canoeboot as they relate to BSD:
|
||||
|
||||
### Kernel Mode Setting
|
||||
|
||||
Your BSD system *must* support Kernel Mode Setting for your graphics
|
||||
device (most of them do nowadays). The reasons will become apparent, as
|
||||
you read this article.
|
||||
|
||||
Boot BSD, using SeaBIOS
|
||||
=======================
|
||||
### Boot BSD, using SeaBIOS
|
||||
|
||||
On x86 platforms, Canoeboot provides the choice of GRUB and/or
|
||||
SeaBIOS payload. GRUB can technically boot BSD kernels, but the code is
|
||||
|
|
@ -37,8 +131,18 @@ If you don't plan to set up Xorg/Wayland, then that's all you really need to
|
|||
do. For example, you might want to run a headless server, in which case you
|
||||
probably don't mind running in text mode all the time.
|
||||
|
||||
OpenBSD and corebootfb
|
||||
----------------------
|
||||
#### GRUB payload
|
||||
|
||||
GRUB *can* directly boot many BSD systems, but this is ill advisable. You are
|
||||
advised to use either SeaBIOS, and boot a BIOS-based BSD bootloader, or use
|
||||
Canoeboot's [U-Boot payload](../uboot/) and use it to boot via UEFI; U-Boot's
|
||||
bootflow menu can achieve this.
|
||||
|
||||
The U-Boot coreboot payload is still experimental, on ARM64 *and* x86/x86\_64,
|
||||
so you should probably use SeaBIOS for now (on x86). U-Boot is the *only*
|
||||
coreboot payload for Canoeboot on ARM64 motherboards.
|
||||
|
||||
### OpenBSD and corebootfb
|
||||
|
||||
It's still recommended to use SeaBIOS in text mode, but OpenBSD specifically
|
||||
can work with SeaBIOS booting in a coreboot framebuffer, with SeaVGABIOS. In
|
||||
|
|
@ -46,19 +150,22 @@ Canoeboot ROM images, this would be SeaBIOS images with `corebootfb` in the
|
|||
file name.
|
||||
|
||||
Make sure to select MBR-style partitioning on the installer, and it will
|
||||
Just Work.
|
||||
Just Work. **GPT partitioning won't work in OpenBSD, if you use the SeaBIOS
|
||||
payload, but will work if you boot/install it via UEFI boot method with
|
||||
Canoeboot's [U-Boot UEFI payload](../uboot/uboot-x86.md) instead.**
|
||||
|
||||
If you're using the GRUB payload but SeaBIOS is available in the boot menu,
|
||||
you can just select SeaBIOS at said menu, and OpenBSD will work fine.
|
||||
|
||||
FreeBSD and corebootfb
|
||||
----------------------
|
||||
### FreeBSD and corebootfb
|
||||
|
||||
Assumed broken, so please ensure that you boot with SeaBIOS payload in text
|
||||
mode (cbmk ROM images with `txtmode` in the file name, not `corebootfb`).
|
||||
|
||||
Warnings for X11 users
|
||||
----------------------
|
||||
Please boot in *text mode*. FreeBSD can be configured to use KMS, if you need
|
||||
Xorg or wayland.
|
||||
|
||||
### Warnings for X11 users
|
||||
|
||||
One important peculiarity of most Canoeboot systems is: VGA mode
|
||||
support exists, if booting with corebootfb (coreboot's own framebuffer) and
|
||||
|
|
@ -169,3 +276,36 @@ extremely expensive computationally speaking. This is why modern kernels
|
|||
You can learn more about INT10H text/VGA modes here:
|
||||
|
||||
<https://en.wikipedia.org/wiki/INT_10H>
|
||||
|
||||
If you use the *U-Boot* payload, INT10H is irrelevant because you will rely on
|
||||
an EFI framebuffer instead, which U-Boot does provide (piggybacking off of the
|
||||
coreboot framebuffer where one is available).
|
||||
|
||||
Regardless of whether you have an EFI framebuffer or INT10H VGA interrupts,
|
||||
the various BSD systems all support KMS so you should be able to use Xorg or
|
||||
Wayland just fine.
|
||||
|
||||
ALWAYS READ THE MANUAL
|
||||
----------------------
|
||||
|
||||
All of the BSDs have *excellent* documentation; it's one of the defining
|
||||
characteristics, versus typical Linux distros. This is precisely *because*
|
||||
the BSDs develop everything in-house, so the various components of a BSD
|
||||
system are much more heavily integrated, and this means that they can provide
|
||||
much more reliable documentation; reliable from both the user's perspective
|
||||
and from the perspective of technical correctness.
|
||||
|
||||
Aside from these and other quirks when installing BSD *on Canoeboot*, the BSDs
|
||||
otherwise work in exactly the same way as you would expect, and you can
|
||||
follow along to their official documentation without much fuss.
|
||||
|
||||
No specific or detailed guides will be provided here, because SeaBIOS is
|
||||
fairly self-explanatory; you can otherwise refer to the SeaBIOS
|
||||
documentation.
|
||||
|
||||
DO NOT USE ROM IMAGES WITH `seabios_grubfirst` IN THE FILE NAME! These were
|
||||
present in older Canoeboot releases, and supported in previous revisions
|
||||
of the build system, but they did not work for the intended purpose. More
|
||||
info is written on the [Canoeboot installation guide](../install/). ROM
|
||||
images with `seabios_grubfirst` in the filename will NOT be included in
|
||||
future Canoeboot releases.
|
||||
|
|
|
|||
|
|
@ -1,19 +1,12 @@
|
|||
---
|
||||
title: Build from source
|
||||
title: Compile Canoeboot from source
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
WARNING: eCryptfs file name limits
|
||||
=================================
|
||||
If you need to build Canoeboot from source, this guide is for you.
|
||||
|
||||
Do not run the build system on a eCryptfs file system, because it has
|
||||
very short file name limits and Canoeboot's build system deals with very
|
||||
long file names. We commonly get reports from this by Linux Mint users
|
||||
who encrypt their home directory with eCryptfs; regular LUKS encryption will
|
||||
do nicely.
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
------------
|
||||
|
||||
Canoeboot's build system is named `cbmk`, short for `CanoeBoot MaKe`, and this
|
||||
document describes how to use it. With this guide, you can know how to compile
|
||||
|
|
@ -22,8 +15,16 @@ canoeboot from the available source code.
|
|||
The following document describes how `cbmk` works, and how you can make changes
|
||||
to it: [canoeboot maintenance manual](../maintain/)
|
||||
|
||||
### WARNING: eCryptfs file name limits
|
||||
|
||||
Do not run the build system on a eCryptfs file system, because it has
|
||||
very short file name limits and Canoeboot's build system deals with very
|
||||
long file names. We commonly get reports from this by Linux Mint users
|
||||
who encrypt their home directory with eCryptfs; regular LUKS encryption will
|
||||
do nicely.
|
||||
|
||||
System requirements
|
||||
===================
|
||||
-------------------
|
||||
|
||||
You must ensure that you have the correct operating system, CPU, RAM, disk space
|
||||
and so on.
|
||||
|
|
@ -32,7 +33,7 @@ System requirements are documented in
|
|||
the [cbmk maintenance manual](../maintain/#system-requirements).
|
||||
|
||||
Multi-threaded builds
|
||||
=====================
|
||||
---------------------
|
||||
|
||||
Canoeboot's build system defaults to a single build thread, but you can change
|
||||
it by doing e.g.
|
||||
|
|
@ -46,7 +47,7 @@ is passed, where THREADS is the number of threads. This is also set when running
|
|||
xz commands for compression, using the `-t` option.
|
||||
|
||||
Environmental variables
|
||||
=======================
|
||||
-----------------------
|
||||
|
||||
Please read about environmental variables in [the build
|
||||
instructions](../maintain/), before running cbmk. You should set
|
||||
|
|
@ -54,14 +55,14 @@ your variables accordingly, though you do not technically need to; some
|
|||
of them may be useful, e.g. `XBMK_THREADS` (sets the number of build threads).
|
||||
|
||||
Sources
|
||||
=======
|
||||
-------
|
||||
|
||||
This version, if hosted live on canoeboot.org, assumes that you are using
|
||||
the `cbmk` git repository, which
|
||||
you can download using the instructions on [the code review page](../../git.md).
|
||||
|
||||
Git
|
||||
===
|
||||
---
|
||||
|
||||
Canoeboot's build system uses Git, extensively. You should perform the steps
|
||||
below, *even if you're using a release archive*.
|
||||
|
|
@ -81,21 +82,18 @@ You may also want to follow more of the steps here:
|
|||
<https://git-scm.com/book/en/v2/Getting-Started-First-Time-Git-Setup>
|
||||
|
||||
How to compile Canoeboot
|
||||
========================
|
||||
|
||||
Actual development/testing is always done using cbmk directly, and this
|
||||
includes when building from source. Here are some instructions to get you
|
||||
started:
|
||||
|
||||
Zero..st, check time/date
|
||||
-------------------------
|
||||
### Zero..st, check time/date
|
||||
|
||||
Make sure date/hwclock report the correct time and date on your system,
|
||||
because parts of the build process download from HTTPS servers and wrong
|
||||
time or date can cause connections to be dropped during negotiation.
|
||||
|
||||
First, install build dependencies
|
||||
---------------------------------
|
||||
### First, install build dependencies
|
||||
|
||||
Check `config/dependencies/` for list of supported distros.
|
||||
|
||||
|
|
@ -131,8 +129,7 @@ Technically, any Linux distribution can be used to build canoeboot.
|
|||
However, you will have to write your own script for installing build
|
||||
dependencies.
|
||||
|
||||
Debian Trixie/Sid
|
||||
-----------------
|
||||
### Debian Trixie/Sid
|
||||
|
||||
Debian Trixie, the testing release as of 3 January 2025, and Debian Sid,
|
||||
provide `gnat` and `gcc` as you expect, but `gnat` resolves to `gnat-13` and
|
||||
|
|
@ -169,8 +166,7 @@ When we tested with this configuration, the KGPE-D16 images also compiled.
|
|||
NOTE: Ubuntu 24.10 also has the issue described above. Some other distros may
|
||||
also have it, if they're based on Debian Testing/Sid or Ubuntu 24.10.
|
||||
|
||||
MIPS cross compiler
|
||||
-------------------
|
||||
### MIPS cross compiler
|
||||
|
||||
Canoeboot has support for the Sony PlayStation (PS1/PSX), based on
|
||||
the PCSX-Redux Open BIOS. If you're doing a full release build, and/or
|
||||
|
|
@ -185,8 +181,7 @@ If your distro doesn't have the MIPS compiler available,
|
|||
the [PlayStation](../install/playstation.md) page provides instructions for
|
||||
manual installation; please do this in addition to the normal dependencies.
|
||||
|
||||
Next, build ROM images
|
||||
----------------------
|
||||
### Next, build ROM images
|
||||
|
||||
Canoeboot MaKe (cbmk) automatically runs all necessary commands; for
|
||||
example, `./mk -b coreboot` will automatically build the required payloads
|
||||
|
|
@ -205,8 +200,7 @@ or get a list of supported build targets:
|
|||
|
||||
./mk -b coreboot list
|
||||
|
||||
Or maybe just build payloads?
|
||||
-----------------------------
|
||||
### Or maybe just build payloads?
|
||||
|
||||
If you wish to build payloads, you can also do that. For example:
|
||||
|
||||
|
|
@ -232,8 +226,8 @@ example want to modify a config, e.g.:
|
|||
Or perhaps add a new board! The maintenance manual will teach you how the
|
||||
Canoeboot build system (cbmk) works!
|
||||
|
||||
Post-compilation steps
|
||||
======================
|
||||
A note about documentation (and this page)
|
||||
-------------------------------
|
||||
|
||||
So you compiled your Canoeboot image? Congratulations!
|
||||
|
||||
|
|
|
|||
|
|
@ -7,17 +7,8 @@ x-toc-enable: true
|
|||
still in English, and there may be some differences aside from translation,
|
||||
versus the English version.**
|
||||
|
||||
WARNING: eCryptfs file name limits
|
||||
=================================
|
||||
|
||||
Do not run the build system on a eCryptfs file system, because it has
|
||||
very short file name limits and Canoeboot's build system deals with very
|
||||
long file names. We commonly get reports from this by Linux Mint users
|
||||
who encrypt their home directory with eCryptfs; regular LUKS encryption will
|
||||
do nicely.
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
------------
|
||||
|
||||
Система побудови canoeboot, називається `cbmk`, скорочення від `CanoeBoot MaKe`, і цей
|
||||
документ описує те, як використовувати її. З цим керівництвом ви можете узнати те, як побудувати
|
||||
|
|
@ -34,8 +25,16 @@ canoeboot з доступного джерельного коду.
|
|||
Наступний документ описує те, як працює `cbmk`, і як ви можете робити зміни
|
||||
до нього: [керівництво обслуговування canoeboot](../maintain/)
|
||||
|
||||
### WARNING: eCryptfs file name limits
|
||||
|
||||
Do not run the build system on a eCryptfs file system, because it has
|
||||
very short file name limits and Canoeboot's build system deals with very
|
||||
long file names. We commonly get reports from this by Linux Mint users
|
||||
who encrypt their home directory with eCryptfs; regular LUKS encryption will
|
||||
do nicely.
|
||||
|
||||
System requirements
|
||||
===================
|
||||
-------------------
|
||||
|
||||
You must ensure that you have the correct operating system, CPU, RAM, disk space
|
||||
and so on.
|
||||
|
|
@ -44,7 +43,7 @@ System requirements are documented in
|
|||
the [cbmk maintenance manual](../maintain/#system-requirements).
|
||||
|
||||
Multi-threaded builds
|
||||
=====================
|
||||
---------------------
|
||||
|
||||
Canoeboot's build system defaults to a single build thread, but you can change
|
||||
it by doing e.g.
|
||||
|
|
@ -58,15 +57,15 @@ is passed, where THREADS is the number of threads. This is also set when running
|
|||
xz commands for compression, using the `-t` option.
|
||||
|
||||
Environmental variables
|
||||
=======================
|
||||
-----------------------
|
||||
|
||||
Please read about environmental variables in [the build
|
||||
instructions](../maintain/), before running cbmk. You should set
|
||||
your variables accordingly, though you do not technically need to; some
|
||||
of them may be useful, e.g. `XBMK_THREADS` (sets the number of build threads).
|
||||
|
||||
Introduction
|
||||
============
|
||||
Environmental variables
|
||||
-----------------------
|
||||
|
||||
Please read about environmental variables in [the build
|
||||
instructions](../maintain/), before running cbmk. You should set
|
||||
|
|
@ -74,7 +73,7 @@ your variables accordingly, though you do not technically need to; some
|
|||
of them may be useful, e.g. `XBMK_THREADS` (sets the number of build threads).
|
||||
|
||||
Git
|
||||
===
|
||||
---
|
||||
|
||||
Система побудови Canoeboot використовує Git, обширно. Ви маєте виконати кроки
|
||||
знизу, *навіть, якщо ви використовуєте архів випуску*.
|
||||
|
|
@ -94,17 +93,15 @@ Git
|
|||
<https://git-scm.com/book/en/v2/Getting-Started-First-Time-Git-Setup>
|
||||
|
||||
Build
|
||||
=====
|
||||
-----
|
||||
|
||||
Zero..st, check time/date
|
||||
-------------------------
|
||||
### Zero..st, check time/date
|
||||
|
||||
Make sure date/hwclock report the correct time and date on your system,
|
||||
because parts of the build process download from HTTPS servers and wrong
|
||||
time or date can cause connections to be dropped during negotiation.
|
||||
|
||||
Побудова з джерельного коду
|
||||
============================
|
||||
### Побудова з джерельного коду
|
||||
|
||||
Фактична розробка/тестування завжди виконується безпосередньо за допомогою `cbmk`, і це також
|
||||
стосується збирання з джерельного коду. Ось кілька інструкцій, щоб
|
||||
|
|
@ -129,8 +126,7 @@ Check: `config/dependencies/` for list of supported distros.
|
|||
Однак, вам потрібно буде написано свій власний сценарій для встановлення залежностей
|
||||
побудови.
|
||||
|
||||
Debian Trixie/Sid
|
||||
-----------------
|
||||
### Debian Trixie/Sid
|
||||
|
||||
Debian Trixie, the testing release as of 3 January 2025, and Debian Sid,
|
||||
provide `gnat` and `gcc` as you expect, but `gnat` resolves to `gnat-13` and
|
||||
|
|
@ -167,8 +163,7 @@ When we tested with this configuration, the KGPE-D16 images also compiled.
|
|||
NOTE: Ubuntu 24.10 also has the issue described above. Some other distros may
|
||||
also have it, if they're based on Debian Testing/Sid or Ubuntu 24.10.
|
||||
|
||||
MIPS cross compiler
|
||||
-------------------
|
||||
### MIPS cross compiler
|
||||
|
||||
Canoeboot has support for the Sony PlayStation (PS1/PSX), based on
|
||||
the PCSX-Redux Open BIOS. If you're doing a full release build, and/or
|
||||
|
|
@ -183,8 +178,7 @@ If your distro doesn't have the MIPS compiler available,
|
|||
the [PlayStation](../install/playstation.md) page provides instructions for
|
||||
manual installation; please do this in addition to the normal dependencies.
|
||||
|
||||
Next, build ROM images
|
||||
----------------------
|
||||
### Next, build ROM images
|
||||
|
||||
В якості результату, ви тепер можете (після встановлення правильних залежностей побудови) виконати
|
||||
лише одну команду, з свіжого Git clone, для побудови образів ROM:
|
||||
|
|
|
|||
|
|
@ -8,17 +8,19 @@ documentation, but there are aspects of Canoeboot that deserve special
|
|||
treatment. Canoeboot provides the option to boot GRUB directly, running on
|
||||
bare metal (instead of using BIOS or UEFI services).
|
||||
|
||||
[The Linux section](../linux/) also has canoeboot-specific guides for
|
||||
Boot Linux from GRUB
|
||||
--------------------
|
||||
|
||||
[The Linux section](../linux/) also has Canoeboot-specific guides for
|
||||
dealing with Linux distributions when using GRUB directly, in this
|
||||
setup. [A similar section exists for BSD operating systems](../bsd/)
|
||||
|
||||
GRUB keyboard layouts
|
||||
=====================
|
||||
---------------------
|
||||
|
||||
It is possible to use *any* keymap in GRUB.
|
||||
|
||||
Custom keyboard layout
|
||||
----------------------
|
||||
### Custom keyboard layout
|
||||
|
||||
Keymaps are stored in `config/grub/keymap/`
|
||||
|
||||
|
|
@ -30,7 +32,7 @@ files:
|
|||
When you build GRUB from source, you can use the `grub-mklayout` program to
|
||||
create a special keymap file for GRUB. [Learn how to build GRUB](../build/)
|
||||
|
||||
To compile GRUB, in lbmk, do this:
|
||||
To compile GRUB, in cbmk, do this:
|
||||
|
||||
./mk -b grub default
|
||||
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: Documentation
|
||||
title: Canoeboot documentation
|
||||
...
|
||||
|
||||
Always check the Canoeboot website for the latest updates to
|
||||
|
|
@ -8,22 +8,24 @@ the [main news section](../news/).
|
|||
|
||||
[Answers to Frequently Asked Questions about Canoeboot](../faq.md).
|
||||
|
||||
What is Canoeboot? An article is available for that; please read the
|
||||
article titled [What is Canoeboot?](../about.md).
|
||||
Need help?
|
||||
----------
|
||||
|
||||
Help is available on [Canoeboot IRC](../contact.md) and other channels.
|
||||
|
||||
Installing Canoeboot
|
||||
====================
|
||||
--------------------
|
||||
|
||||
- [How to install Canoeboot](install/)
|
||||
|
||||
Documentation related to operating systems
|
||||
============================
|
||||
Installing operating systems
|
||||
----------------------------
|
||||
|
||||
- [How to install BSD operating systems](bsd/)
|
||||
- [How to install Linux](linux/)
|
||||
|
||||
Information for developers
|
||||
==========================
|
||||
--------------------------
|
||||
|
||||
- [How to compile the Canoeboot source code](build/)
|
||||
- [Build system developer documentation](maintain/)
|
||||
|
|
@ -31,7 +33,7 @@ Information for developers
|
|||
- [U-Boot payload](uboot/)
|
||||
|
||||
Other information
|
||||
=================
|
||||
-----------------
|
||||
|
||||
- [Miscellaneous](misc/)
|
||||
- [List of codenames](misc/codenames.md)
|
||||
|
|
|
|||
|
|
@ -8,22 +8,23 @@ Canoeboot. Новини, включаючи оголошення про випу
|
|||
|
||||
[Відповіді на поширені запитання про Canoeboot](../faq.md).
|
||||
|
||||
What is Canoeboot? An article is available for that; please read the
|
||||
article titled [What is Canoeboot?](../about.md).
|
||||
Need help?
|
||||
----------
|
||||
|
||||
Help is available on [Canoeboot IRC](../contact.md) and other channels.
|
||||
|
||||
Встановлення Canoeboot
|
||||
====================
|
||||
|
||||
- [Як встановити Canoeboot](install/)
|
||||
|
||||
Документація, яка має відношення до операційних систем
|
||||
============================
|
||||
-----------------------------------------------------
|
||||
|
||||
- [Як встановити BSD на x86 хостову систему](bsd/)
|
||||
- [Керівництва Linux](linux/)
|
||||
|
||||
Інформація для розробників
|
||||
==========================
|
||||
--------------------------
|
||||
|
||||
- [Як зібрати джерельний код Canoeboot](build/)
|
||||
- [Документація розробника системи побудови](maintain/)
|
||||
|
|
@ -31,7 +32,7 @@ article titled [What is Canoeboot?](../about.md).
|
|||
- [Корисне навантаження U-Boot](uboot/)
|
||||
|
||||
Інша інформація
|
||||
=================
|
||||
---------------
|
||||
|
||||
- [Різне](misc/)
|
||||
- [Список кодових назв](misc/codenames.md)
|
||||
|
|
|
|||
|
|
@ -2,26 +2,31 @@
|
|||
title: 文档
|
||||
...
|
||||
|
||||
canoeboot 的最新更新,可以在 [canoeboot.org](https://canoeboot.org) 上找到。新闻,包括新版发布公告,可以在[新闻主页](../news/)中找到。
|
||||
Canoeboot 的最新更新,可以在 [canoeboot.org](https://canoeboot.org) 上找到。新闻,包括新版发布公告,可以在[新闻主页](../news/)中找到。
|
||||
|
||||
[canoeboot 常见问题解答](../faq.md).
|
||||
[Canoeboot 常见问题解答](../faq.md).
|
||||
|
||||
What is Canoeboot? An article is available for that; please read the
|
||||
article titled [What is Canoeboot?](../about.md).
|
||||
|
||||
安装 canoeboot
|
||||
====================
|
||||
Need help?
|
||||
----------
|
||||
|
||||
Help is available on [Canoeboot IRC](../contact.md) and other channels.
|
||||
|
||||
安装 Canoeboot
|
||||
--------------
|
||||
|
||||
- [如何安装 Canoeboot](install/)
|
||||
|
||||
操作系统相关文档
|
||||
============================
|
||||
----------------
|
||||
|
||||
- [如何在 x86 机器上安装 BSD](bsd/)
|
||||
- [Linux 指南](linux/)
|
||||
|
||||
开发者信息
|
||||
==========================
|
||||
----------
|
||||
|
||||
- [如何编译 canoeboot 源代码](build/)
|
||||
- [构建系统开发者文档](maintain/)
|
||||
|
|
@ -29,7 +34,7 @@ article titled [What is Canoeboot?](../about.md).
|
|||
- [U-Boot payload](uboot/)
|
||||
|
||||
其它信息
|
||||
=================
|
||||
--------
|
||||
|
||||
- [杂项](misc/)
|
||||
- [代号列表](misc/codenames.md)
|
||||
|
|
|
|||
|
|
@ -1,8 +1,15 @@
|
|||
---
|
||||
title: ASUS Chromebook C201 installation guide
|
||||
title: Install Canoeboot ASUS Chromebook C201
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
ASUS Chromebook C201 motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
WARNING: This board is known to have non-functioning video init at the time
|
||||
of writing, 19 February 2023. It is as yet unsolved.
|
||||
|
||||
|
|
@ -10,14 +17,13 @@ See: <https://notabug.org/libreboot/lbmk/issues/136> (NOTE: Libreboot issue page
|
|||
not Canoeboot)
|
||||
|
||||
Introduction
|
||||
===========
|
||||
------------
|
||||
|
||||
This page contains information about assembly and disassembly, for flashing
|
||||
the ASUS Chromebook C201 externally. It will also link to internal flashing
|
||||
instructions, and information about U-Boot.
|
||||
|
||||
Flashrom
|
||||
--------
|
||||
### Flashrom
|
||||
|
||||
A special fork of flashrom, maintained by Google, is required for flashing.
|
||||
More information about this is present in the generic [chromebook flashing
|
||||
|
|
@ -27,8 +33,7 @@ NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog
|
|||
now, as of 3 May 2024, which is a fork of flashrom, but the chromium fork
|
||||
is another fork of flashrom, and you should use that on chromebooks.
|
||||
|
||||
Depthcharge payload (obsolete)
|
||||
------------------------------
|
||||
### Depthcharge payload (obsolete)
|
||||
|
||||
This board was also supported in Libreboot 20160907, with the Depthcharge
|
||||
payload. Support was dropped in later releases, and then re-added in the
|
||||
|
|
@ -41,7 +46,7 @@ instructions pertaining to Depthcharge:
|
|||
* <https://notabug.org/libreboot/lbwww/src/4be2eed23e11b1071cd500a329abf654ab25f942/site/docs/hardware/c201.md>
|
||||
|
||||
U-boot payload
|
||||
==============
|
||||
--------------
|
||||
|
||||
U-Boot was ported to coreboot CrOS devices, courtesy of Alper Nebi
|
||||
Yasak on behalf of the Libreboot project, upon which Canoeboot is based.
|
||||
|
|
@ -51,7 +56,7 @@ Read the section pertaining to U-boot payload:
|
|||
[u-boot payload documentation for Canoeboot](../uboot/)
|
||||
|
||||
Internal flashing
|
||||
=================
|
||||
------------------
|
||||
|
||||
External flashing is possible, but only necessary in the event of a *brick*.
|
||||
If you're flashing good firmware, and the machine boots properly, you can
|
||||
|
|
@ -63,8 +68,7 @@ the information has moved.
|
|||
|
||||
See: [chromebook flashing instructions](chromebooks.md)
|
||||
|
||||
Write-protect screw
|
||||
-------------------
|
||||
### Write-protect screw
|
||||
|
||||
The chromebook flashing instructions, linked above, refer to a *screw* that
|
||||
can be turned, to disable flash protection. This is necessary, for internally
|
||||
|
|
@ -87,7 +91,7 @@ The write protect screw can be put back in place later, when the device
|
|||
is known to be in a working state.
|
||||
|
||||
External flashing
|
||||
=================
|
||||
-----------------
|
||||
|
||||
If the machine is no longer booting, due to bad firmware, you can unbrick
|
||||
it externally. Refer to [external flash instructions](spi.md).
|
||||
|
|
|
|||
|
|
@ -1,14 +1,30 @@
|
|||
---
|
||||
title: Chromebook flashing instructions
|
||||
title: Install Canoeboot on a Chromebook
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on various ARM64-based
|
||||
Chromebook laptops. Canoeboot replaces proprietary BIOS/UEFI firmware, though
|
||||
it should be noted that Google already ships coreboot and their own payload
|
||||
called Depthcharge, which is all free software; the difference with Canoeboot
|
||||
is that it replaces Depthcharge with *U-Boot* (as a coreboot payload), which
|
||||
provides a lightweight UEFI boot implementation that can boot regular Linux and
|
||||
BSD systems more easily than Depthcharge.
|
||||
|
||||
NOTE: daisy, peach and veyron boards were temporarily removed from
|
||||
cbmk. They should be re-added to Canoeboot at a later date. The reasons
|
||||
are written on the hardware compatibility page. For now, Canoeboot only
|
||||
officially supports the `nyan` and `gru` chromebooks.
|
||||
|
||||
This page attempts to give a brief, general overview of how to flash
|
||||
custom firmware on ChromeOS devices. This guide usually refers to all of
|
||||
them as "Chromebook"s since it's the most common form factor.
|
||||
|
||||
Flashrom
|
||||
========
|
||||
--------
|
||||
|
||||
A special fork of flashrom, maintained by Google, is required for flashing
|
||||
these Chromebook devices. See:
|
||||
|
|
@ -18,7 +34,7 @@ these Chromebook devices. See:
|
|||
You must then compile this from source, and run it.
|
||||
|
||||
Enable ChromeOS "Developer Mode"
|
||||
================================
|
||||
--------------------------------
|
||||
|
||||
Chromebooks are locked-down by default to only run ChromeOS. Most things
|
||||
you will want to do on these require you unlock it by enabling their
|
||||
|
|
@ -39,7 +55,7 @@ where you can run programs. Most of the root file system is read-only,
|
|||
except for `/usr/local` and any mounted drives under `/media/removable`.
|
||||
|
||||
Identify your device
|
||||
====================
|
||||
--------------------
|
||||
|
||||
It's more common to refer to ChromeOS boards by their codenames, and
|
||||
many compatible devices can share a single codename. Canoeboot ROM
|
||||
|
|
@ -51,7 +67,7 @@ device's. There are a number of ways to find it, some are:
|
|||
- Run `crossystem hwid` or `crossystem fwid` in a terminal
|
||||
|
||||
Back up stock firmware
|
||||
======================
|
||||
----------------------
|
||||
|
||||
The stock firmware on your device comes with some irreplaceable data
|
||||
that is unique to your device. This can include the serial number and
|
||||
|
|
@ -73,7 +89,7 @@ If you can already boot a conventional Linux distro on your Chromebook,
|
|||
you may be able to use `flashrom -p linux_mtd` on that system instead.
|
||||
|
||||
Check external flashability
|
||||
===========================
|
||||
---------------------------
|
||||
|
||||
If a ROM image you flash is broken, you may need to restore the stock
|
||||
firmware to fix the board to get internal flashing working. Refer to the
|
||||
|
|
@ -88,7 +104,7 @@ mechanism that lets you flash externally using a special USB debugging
|
|||
cable. However, most boards that Canoeboot supports do not have this.
|
||||
|
||||
Disable write protection
|
||||
========================
|
||||
------------------------
|
||||
|
||||
Chromebooks have the SPI flash chip partially write-protected by
|
||||
default, but thankfully this protection can be disabled by the device
|
||||
|
|
@ -123,7 +139,7 @@ compile and use that flashrom fork to disable write-protection. There is
|
|||
no `cbmk` support yet for automatically building it.
|
||||
|
||||
Prepare the ROM image
|
||||
=====================
|
||||
---------------------
|
||||
|
||||
Canoeboot ROM image layouts are currently incompatible with the regions
|
||||
that should be carried over from the stock firmware. However, the
|
||||
|
|
@ -138,7 +154,7 @@ keep backups of the original firmware.
|
|||
TODO: Instructions to preserve vital data when FMAPs are compatible.
|
||||
|
||||
Flash the ROM image
|
||||
===================
|
||||
-------------------
|
||||
|
||||
WARNING: Although none are supported yet, make sure not to flash ROM
|
||||
images on x86 Chromebooks without injecting non-redistributable blobs
|
||||
|
|
@ -158,7 +174,7 @@ If you can already boot a conventional Linux distro on your Chromebook,
|
|||
you may be able to use `flashrom -p linux_mtd` on that system instead.
|
||||
|
||||
Install an operating system (experimental research)
|
||||
===========================
|
||||
------------------------------------------------
|
||||
|
||||
In general, ARM-compatible distros targeting U-boot can be used. There are
|
||||
three general methods for installing that vary depending on the distribution:
|
||||
|
|
@ -168,25 +184,22 @@ three general methods for installing that vary depending on the distribution:
|
|||
3. extlinux.conf - a newer flat, bootloader-spec text file that typically lives
|
||||
in /boot/extlinux/extlinux.conf
|
||||
|
||||
Successful installations:
|
||||
-------------------------
|
||||
### Successful installations:
|
||||
|
||||
* [ArchLinuxARM on RK3399-based Chromebooks](../uboot/uboot-archlinux.md).
|
||||
* [Debian Bookworm on Samsung Chromebook Plus XE513C24](../uboot/uboot-debian-bookworm.md).
|
||||
* [Debian on Asus Chromebook C201](https://wiki.debian.org/InstallingDebianOn/Asus/C201).
|
||||
|
||||
Unsuccessful installations:
|
||||
---------------------------
|
||||
### Unsuccessful installations:
|
||||
|
||||
* [OpenBSD on Samsung Chromebook Plus XE513C24](../uboot/uboot-openbsd.md).
|
||||
|
||||
Other promising ARM-compatible distros:
|
||||
---------------------------------------
|
||||
### Other promising ARM-compatible distros:
|
||||
|
||||
* [Armbian](https://www.armbian.com/uefi-arm64/).
|
||||
|
||||
See also
|
||||
========
|
||||
--------
|
||||
|
||||
* [ChromiumOS Documentation](https://chromium.googlesource.com/chromiumos/docs/+/HEAD/)
|
||||
* [ChromiumOS Firmware Test Manual](https://chromium.googlesource.com/chromiumos/docs/+/HEAD/firmware_test_manual.md)
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: Intel D945GCLF desktop board
|
||||
title: Install Canoeboot on Intel D945GCLF and/or D945GCLF2
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
|
|
@ -21,7 +21,7 @@ motherboard while they still have the original BIOS present.
|
|||
| **Graphics** | ? |
|
||||
| **Display** | None. |
|
||||
| **Memory** | Up to 2GB |
|
||||
| **Architecture** | x86_64 |
|
||||
| **Architecture** | x86\_64 |
|
||||
| **Original boot firmware** | Intel BIOS |
|
||||
| **Intel ME/AMD PSP** | Not present. |
|
||||
| **Flash chip** | SOIC-8 512KiB |
|
||||
|
|
@ -50,13 +50,21 @@ P*: Partially works with vendor firmware
|
|||
| **SeaBIOS** | Works |
|
||||
| **SeaBIOS with GRUB** | Doesn't work |
|
||||
</div>
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Intel D945GCLF and/or D945GCLF2 desktop motherboard. Canoeboot replaces
|
||||
proprietary BIOS/UEFI firmware.
|
||||
|
||||
If you just want flashing instructions, go to
|
||||
[../install/d945gclf.md](../install/d945gclf.md)
|
||||
|
||||
D945GCLF2D also reported working by a user.
|
||||
|
||||
Introduction
|
||||
============
|
||||
------------
|
||||
|
||||
This board is a mini-itx desktop board for 2008. It uses an atom 230,
|
||||
which is a singe core CPU but it is hyperthreaded so it appears to have
|
||||
|
|
@ -79,8 +87,7 @@ hyperthreaded). Since the board is almost identical (and coreboot code
|
|||
seem to indicate that it works, since MAX\_CPU=4 is set), it is believed
|
||||
that it should also work but this is untested.
|
||||
|
||||
Remarks about vendor bios:
|
||||
--------------------------
|
||||
### Remarks about vendor bios:
|
||||
|
||||
- Without Canoeboot or Libreboot this board is completely useless, since the
|
||||
vendor bios is very bad. It cannot boot from any HDD whether it is
|
||||
|
|
@ -99,15 +106,14 @@ And SPI SOIC8 flash chip\
|
|||
{width="50%" height="50%"}
|
||||
|
||||
Flashing instructions {#clip}
|
||||
=====================
|
||||
-----------------------------
|
||||
|
||||
Refer to [spi.md](spi.md) for how to re-flash externally.
|
||||
|
||||
Here is an image of the flash chip:\
|
||||
|
||||
|
||||
How to replace thermal paste and fan
|
||||
------------------------------------
|
||||
### How to replace thermal paste and fan
|
||||
|
||||
This board comes with very crappy disposable loud fan, that one has no
|
||||
bearings, which can not be repaired or oiled properly, do not waste your
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: Dell OptiPlex 780 MT/USFF
|
||||
title: Install Canoeboot on Dell OptiPlex 780 MT/USFF
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
|
|
@ -52,14 +52,18 @@ P*: Partially works with vendor firmware
|
|||
| **SeaBIOS** | Works |
|
||||
| **SeaBIOS with GRUB** | Works |
|
||||
</div>
|
||||
Introduction
|
||||
============
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
-------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Dell OptiPlex 780 desktop motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
Official information about the computer can be found here:
|
||||
<https://www.dell.com/support/manuals/en-uk/optiplex-7010-plus-small-ff/opti_7010_sff_plus_om/specifications-of-optiplex-small-form-factor-plus-7010?guid=guid-7c9f07ce-626e-44ca-be3a-a1fb036413f9&lang=en-us>
|
||||
|
||||
Build ROM image from source
|
||||
---------------------------
|
||||
### Build ROM image from source
|
||||
|
||||
The build target, when building from source, is thus:
|
||||
|
||||
|
|
@ -72,25 +76,27 @@ The `_truncate` image is needed if you're flashing Canoeboot internally from
|
|||
the original Dell firmware. Otherwise, you only need the regular images that
|
||||
lack `_truncate` in the file name.
|
||||
|
||||
100% FREE
|
||||
=========
|
||||
Alternatively, you can use release images instead of compiling from source.
|
||||
|
||||
### 100% FREE / OPEN SOURCE!
|
||||
|
||||
This mainboard is entirely free software in the main boot flash. It is using
|
||||
the Intel X4X / ICH10 platform, same as on the already supported
|
||||
Gigabyte GA-G41M-ES2L mainboard.
|
||||
|
||||
Installation
|
||||
============
|
||||
Install Canoeboot
|
||||
-----------------
|
||||
|
||||
Set MAC address
|
||||
---------------
|
||||
These next sections will teach you how to install Canoeboot, on your
|
||||
Dell OptiPlex 780 motherboard.
|
||||
|
||||
### Set MAC address
|
||||
|
||||
This platform uses an Intel Flash Descriptor, and defines an Intel GbE NVM
|
||||
region. As such, release/build ROMs will contain the same MAC address. To
|
||||
change the MAC address, please read [nvmutil documentation](../install/nvmutil.md).
|
||||
|
||||
WARNING about CPU/GPU compatibility
|
||||
-------------------------------
|
||||
### WARNING about CPU/GPU compatibility
|
||||
|
||||
Coreboot has libre initialisation code for Intel graphics, but libre
|
||||
initialisation code is not available for most graphics cards. This machine can
|
||||
|
|
@ -99,8 +105,7 @@ used, SeaBIOS executes its VGA ROM which provides video init, instead of
|
|||
coreboot's native Intel video init. GRUB piggybacks off of what SeaBIOS did,
|
||||
so the GRUB payload will also work.
|
||||
|
||||
Flash a ROM image (software)
|
||||
-----------------
|
||||
### Flash a ROM image (software)
|
||||
|
||||
**Always make sure to dump a copy of the current flash first. ALSO: [make
|
||||
sure /dev/mem protection is disabled](devmem.md) for the flashing to work!**
|
||||
|
|
@ -149,8 +154,7 @@ the full image; the one without `_truncate` in the file name uses all of the
|
|||
flash, with the BIOS region ending at the 8MB limit, so the BIOS region is
|
||||
therefore 2MB larger on those images.
|
||||
|
||||
Flash a ROM image (hardware)
|
||||
-----------------
|
||||
### Flash a ROM image (hardware)
|
||||
|
||||
For general information, please refer to [25xx NOR flash
|
||||
instructions](../install/spi.md) - that page refers to use of socketed flash.
|
||||
|
|
|
|||
|
|
@ -12,7 +12,7 @@ access once you no longer need it, as this is a useful security layer against
|
|||
any wrongful operations that you may later inadvertently run as root.
|
||||
|
||||
Also disable SecureBoot
|
||||
=======================
|
||||
-----------------------
|
||||
|
||||
If you're using a UEFI setup, it's probably because you're using
|
||||
a latter Intel platform and want to flash Canoeboot internally, from
|
||||
|
|
@ -23,7 +23,7 @@ using the factory firmware, please ensure that *SecureBoot* is disabled,
|
|||
because it will interfere with lower memory accesses if left enabled.
|
||||
|
||||
FLASH ERRORS (and workarounds)
|
||||
=======================
|
||||
------------------------------
|
||||
|
||||
**NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog)
|
||||
now, which is a fork of flashrom.**
|
||||
|
|
@ -33,8 +33,7 @@ This section relates to installing Canoeboot on supported targets.
|
|||
Right out of the gate, some users may experience errors with flashprog when
|
||||
using the internal programmer. They are:
|
||||
|
||||
/dev/mem access error
|
||||
---------------------
|
||||
### /dev/mem access error
|
||||
|
||||
NOTE: if running `flashprog -p internal` for software based flashing, and you
|
||||
get an error related to `/dev/mem` access, you should reboot with
|
||||
|
|
@ -46,8 +45,7 @@ is `kernel.securelevel=-1`; see [NetBSD securelevel
|
|||
manual](https://wiki.netbsd.org/tutorials/kernel_secure_levels/)
|
||||
and [OpenBSD securelevel manual](https://man.openbsd.org/securelevel).
|
||||
|
||||
ERROR: Could not get I/O privileges
|
||||
------------------------------------
|
||||
### ERROR: Could not get I/O privileges
|
||||
|
||||
Error message: `ERROR: Could not get I/O privileges (Function not implemented)`
|
||||
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: Gigabyte GA-G41M-ES2L desktop board
|
||||
title: Install Canoeboot on Gigabyte GA-G41M-ES2L
|
||||
...
|
||||
|
||||
<div class="specs">
|
||||
|
|
@ -18,7 +18,7 @@ GA-G41M-ES2L
|
|||
| **Graphics** | Integrated |
|
||||
| **Display** | None. |
|
||||
| **Memory** | Up to 8GB (2x4GB DDR2-800) |
|
||||
| **Architecture** | x86_64 |
|
||||
| **Architecture** | x86\_64 |
|
||||
| **Original boot firmware** | AWARD BIOS |
|
||||
| **Intel ME/AMD PSP** | Present. Can be disabled |
|
||||
| **Flash chip** | 2x8Mbit |
|
||||
|
|
@ -48,8 +48,12 @@ P*: Partially works with vendor firmware
|
|||
| **SeaBIOS with GRUB** | Works |
|
||||
</div>
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Gigabyte GA-G41M-ES2L desktop motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
This is a desktop board using intel hardware (circa \~2009, ICH7
|
||||
southbridge, similar performance-wise to the ThinkPad X200. It can make
|
||||
|
|
@ -85,7 +89,7 @@ You can learn more about using the build system, cbmk, here:\
|
|||
[Canoeboot build instructions](../build/)
|
||||
|
||||
RAM
|
||||
===
|
||||
---
|
||||
|
||||
**This board is very picky with RAM. If it doesn't boot, try an EHCI debug
|
||||
dongle, serial usb adapter and null modem cable, or spkmodem, to get a
|
||||
|
|
@ -101,7 +105,7 @@ Many other modules will probably work just fine, but raminit is very picky on
|
|||
this board. Your mileage *will* fluctuate, wildly.
|
||||
|
||||
MAC ADDRESS
|
||||
===========
|
||||
-----------
|
||||
|
||||
NOTE: due to a bug in the hardware, the MAC address is hardcoded in
|
||||
coreboot. Therefore, you must set your own MAC address in your
|
||||
|
|
@ -112,14 +116,14 @@ distro, to set a valid MAC address. By doing this, your NIC should
|
|||
work nicely.
|
||||
|
||||
Flash chip size {#flashchips}
|
||||
===============
|
||||
---------------------
|
||||
|
||||
Use this to find out:
|
||||
|
||||
flashprog -p internal
|
||||
|
||||
Flashing instructions {#clip}
|
||||
=====================
|
||||
--------------------------
|
||||
|
||||
Refer to [spi.md](spi.md) for how to set up an SPI programmer for
|
||||
external flashing. *You can only externally reprogram one of the chips
|
||||
|
|
|
|||
|
|
@ -25,7 +25,7 @@ scrapped.
|
|||
Anyway, ich9utils documentation:
|
||||
|
||||
Introduction
|
||||
============
|
||||
------------
|
||||
|
||||
The `ich9utils` utility from Canoeboot is used to manipulate Intel Flash
|
||||
Descriptors for ICH9M on laptops such as ThinkPad X200 or T400. Specifically,
|
||||
|
|
@ -73,7 +73,7 @@ More information about the ME can be found at
|
|||
Another project: <http://io.netgarage.org/me/>
|
||||
|
||||
ich9utils
|
||||
=========
|
||||
---------
|
||||
|
||||
You can find `ich9utils` on the [Libreboot Git page](https://libreboot.org/git.html) or you can download
|
||||
`lbmk` from the same page at an under revision (around Libreboot 20230625 or
|
||||
|
|
@ -90,7 +90,7 @@ Go in there and type `make` to get the binaries: `ich9deblob`, `ich9gen`
|
|||
and `ich9show`.
|
||||
|
||||
ICH9 show utility {#ich9show}
|
||||
================
|
||||
---------------------------
|
||||
|
||||
The *ich9show* utility outputs the entire contents of the descriptor and GbE
|
||||
regions in a given ROM image as supplied by the user. Output is in Markdown
|
||||
|
|
@ -98,7 +98,7 @@ format (Pandoc variant) so that it can be converted easily into various
|
|||
formats. It could even be piped *directly* into pandoc!
|
||||
|
||||
ICH9 gen utility {#ich9gen}
|
||||
================
|
||||
---------------------------
|
||||
|
||||
When you simply run `ich9gen` without any arguments, it generates
|
||||
descriptor+GbE images with a default MAC address in the GbE region. If you wish
|
||||
|
|
@ -190,8 +190,7 @@ Your canoeboot.rom image is now ready to be flashed on the system. Refer
|
|||
back to [../install/\#flashprog](../install/#flashprog) for how to flash
|
||||
it.
|
||||
|
||||
Write-protecting the flash chip
|
||||
-------------------------------
|
||||
### Write-protecting the flash chip
|
||||
|
||||
The `ich9gen` utility (see below) generates two types of descriptor+GbE setup:
|
||||
|
||||
|
|
@ -205,7 +204,7 @@ the contents of flash).
|
|||
For ease of use, Canoeboot provides ROMs that are read-write by default.
|
||||
|
||||
ICH9 deblob utility {#ich9deblob}
|
||||
===================
|
||||
-----------------------------------
|
||||
|
||||
This was the tool originally used to disable the ME on X200 (later
|
||||
adapted for other systems that use the GM45 chipset).
|
||||
|
|
@ -284,7 +283,7 @@ back to [index.md/\#gm45](index.md/#gm45) for how to flash
|
|||
it.
|
||||
|
||||
demefactory utility {#demefactory}
|
||||
===================
|
||||
----------------------------------
|
||||
|
||||
This utility has never been tested, officially, but it *should* work.
|
||||
|
||||
|
|
|
|||
|
|
@ -1,10 +1,14 @@
|
|||
---
|
||||
title: Canoeboot installation guides
|
||||
title: Install Canoeboot
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This article will teach you how to install Canoeboot, on any of the supported
|
||||
laptop, desktop and server motherboards.
|
||||
laptop, desktop and server motherboards of Intel/AMD x86/x86\_64 and ARM64
|
||||
platform. Canoeboot replaces proprietary BIOS/UEFI firmware.
|
||||
|
||||
**ALWAYS remember to make a backup of the current flash, when overwriting it,
|
||||
regardless of what firmware you currently have and what firmware you're
|
||||
|
|
@ -12,7 +16,7 @@ re-flashing it with; this includes updates between Canoeboot releases. Use
|
|||
the `-r` option in flashprog instead `-w`, to read from the flash.**
|
||||
|
||||
Install Canoeboot via external flashing
|
||||
=================
|
||||
---------------------------------------
|
||||
|
||||
Refer to the following article:\
|
||||
[Externally rewrite 25xx NOR flash via SPI protocol](spi.md)
|
||||
|
|
@ -23,10 +27,13 @@ a backup of the current flash contents, prior to flashing, whether you dump
|
|||
externally or internally - if only external flashing is available, then it's
|
||||
usually the case that only external dumping is available too.
|
||||
|
||||
This section relates to installing canoeboot on supported targets.
|
||||
Need help?
|
||||
----------
|
||||
|
||||
Help is available on [Canoeboot IRC](../../contact.md) and other channels.
|
||||
|
||||
Which systems are supported by Canoeboot?
|
||||
========================================
|
||||
-----------------------------------------
|
||||
|
||||
Before actually reading the installation guides, please ensure that your
|
||||
system is fully supported by Canoeboot. More information about the Canoeboot
|
||||
|
|
@ -37,19 +44,16 @@ systems, you can use the U-Boot payload (coreboot still initialises hardware).
|
|||
|
||||
Canoeboot currently supports the following systems:
|
||||
|
||||
Games consoles
|
||||
--------------
|
||||
### Games consoles
|
||||
|
||||
- [Sony Playstation](playstation.md) (PS1/PSX)
|
||||
|
||||
Servers (AMD, x86)
|
||||
------------------
|
||||
### Servers (AMD, x86)
|
||||
|
||||
- [ASUS KFSN4-DRE motherboard](kfsn4-dre.md)
|
||||
- [ASUS KGPE-D16 motherboard](kgpe-d16.md)
|
||||
|
||||
Desktops (AMD, Intel, x86)
|
||||
--------------------------
|
||||
### Desktops (AMD, Intel, x86)
|
||||
|
||||
- [Acer G43T-AM3](acer_g43t-am3.md)
|
||||
- Apple iMac 5,2
|
||||
|
|
@ -59,8 +63,7 @@ Desktops (AMD, Intel, x86)
|
|||
- Intel D510MO and D410PT motherboards
|
||||
- [Intel D945GCLF](d945gclf.md)
|
||||
|
||||
Laptops (Intel, x86)
|
||||
--------------------
|
||||
### Laptops (Intel, x86)
|
||||
|
||||
- [Apple MacBook1,1 and MacBook2,1](macbook21.md)
|
||||
- [Dell Latitude E4300, E6400, E6400 XFR and E6400 ATG](latitude.md)
|
||||
|
|
@ -71,19 +74,17 @@ Laptops (Intel, x86)
|
|||
- Lenovo ThinkPad T60, X60, X60S, X60 Tablet (with Intel GPU)
|
||||
- [Lenovo ThinkPad X200 / X200S / X200 Tablet](x200.md)
|
||||
|
||||
Laptops (ARM, with U-Boot payload)
|
||||
----------------------------------
|
||||
### Laptops (ARM, with U-Boot payload)
|
||||
|
||||
- [ASUS Chromebook Flip C101 (gru-bob)](chromebooks.md)
|
||||
- [Samsung Chromebook Plus (v1) (gru-kevin)](chromebooks.md)
|
||||
|
||||
Emulation
|
||||
---------
|
||||
### Emulation
|
||||
|
||||
- [Qemu x86 and arm64](../misc/emulation.md)
|
||||
|
||||
**Disable security before flashing**
|
||||
================================
|
||||
Disable security before flashing
|
||||
--------------------------------
|
||||
|
||||
**Before internal flashing, you must first disable `/dev/mem` protections. Make
|
||||
sure to re-enable them after you're finished.**
|
||||
|
|
@ -91,7 +92,7 @@ sure to re-enable them after you're finished.**
|
|||
**See: [Disabling /dev/mem protection](devmem.md)**
|
||||
|
||||
ROM image file names
|
||||
====================
|
||||
--------------------
|
||||
|
||||
Canoeboot ROM images are named like
|
||||
this: `payload_board_inittype_displaytype_keymap.rom`
|
||||
|
|
@ -121,7 +122,7 @@ executed instead, if the primary payload is SeaBIOS, whether that be pure
|
|||
SeaBIOS or a SeaGRUB setup.
|
||||
|
||||
EC firmware updates
|
||||
===================
|
||||
-------------------
|
||||
|
||||
Obviously, free EC firmware would be preferable, but it is not the case on
|
||||
all machine. We would like to have free EC firmware on more machines, but for
|
||||
|
|
@ -142,23 +143,21 @@ It is recommended that you update to the latest EC firmware version. The
|
|||
Updating the EC can sometimes provide benefit depending on the vendor. For
|
||||
example, they might fix power issues that could then enhance battery life.
|
||||
|
||||
ThinkPads
|
||||
---------
|
||||
### ThinkPads
|
||||
|
||||
See: <http://www.thinkwiki.org/wiki/BIOS_update_without_optical_disk>
|
||||
|
||||
Otherwise, check the Lenovo website to find the update utility for your
|
||||
mainboard.
|
||||
|
||||
Other
|
||||
-----
|
||||
### Other
|
||||
|
||||
The same wisdom applies to other laptop vendors.
|
||||
|
||||
Non-laptops typically do not have embedded controllers in them.
|
||||
|
||||
Canoeboot installation instructions
|
||||
===================================
|
||||
-----------------------------------
|
||||
|
||||
In general, if Canoeboot is already running, you can skip
|
||||
towards the final section on this page, which provides general internal
|
||||
|
|
@ -172,8 +171,7 @@ Therefore, before following generic guides, make sure to check first whether
|
|||
your board has special instructions, otherwise use the generic guide at the
|
||||
end of this article.
|
||||
|
||||
Intel GbE MAC address (IFD-based systems)
|
||||
---------------------------------------
|
||||
### Intel GbE MAC address (IFD-based systems)
|
||||
|
||||
On all Intel platforms except X4X (e.g. Gigabyte GA-G41M-ES2L) and i945
|
||||
ones (e.g. ThinkPad X60, ThinkPad T60, MacBook2,1), an Intel Flash Descriptor is
|
||||
|
|
@ -183,10 +181,9 @@ flash, and can (must) be changed prior to installation.
|
|||
You can use [nvmutil](nvmutil.md) to change the MAC address. You will perform
|
||||
this modification to the ROM image, before flashing it.
|
||||
|
||||
Flash lockdown / boot security
|
||||
-------------------
|
||||
### Flash lockdown / boot security
|
||||
|
||||
This is referred to informally as *Secure libreBoot*.
|
||||
This is referred to informally as *Secure canoeBoot*.
|
||||
|
||||
Full flash lockdown is possible, with cryptographic verification of your
|
||||
Linux kernel and other files, using special features in the GRUB payload.
|
||||
|
|
@ -205,8 +202,7 @@ See: [GRUB hardening / Secure canoeBoot](../linux/grub_hardening.md)
|
|||
If you already did this, it's possible that you may no longer be able to
|
||||
flash internally. If that is the case, you must [flash externally](spi.md).
|
||||
|
||||
Updating an existing installation
|
||||
---------------------------------
|
||||
### Updating an existing installation
|
||||
|
||||
Unless otherwise stated, in sections pertaining to each mainboard below,
|
||||
an existing Canoeboot installation can be updated via internal flashing,
|
||||
|
|
@ -223,16 +219,14 @@ special steps required that differ from updating an existing installation.
|
|||
The next sections will pertain to specific mainboards, where indicated,
|
||||
followed by general internal flashing instructions where applicable.
|
||||
|
||||
Dell Latitude laptops (vendor BIOS)
|
||||
---------------------
|
||||
### Dell Latitude laptops (vendor BIOS)
|
||||
|
||||
See: [Dell Latitude flashing guide](latitude.md)
|
||||
|
||||
This applies to all supported Dell Latitude models. Remember to [update the
|
||||
MAC address with nvmutil](nvmutil.md), before flashing.
|
||||
|
||||
ThinkPad X200/T400/T500/W500/R400/R500
|
||||
--------------------------------------
|
||||
### ThinkPad X200/T400/T500/W500/R400/R500
|
||||
|
||||
If you're running one of these with Lenovo BIOS, you must externally flash
|
||||
Canoeboot, because the original firmware restricts writes to the flash.
|
||||
|
|
@ -253,35 +247,30 @@ You can find WSON8 probes online, that are similar to a SOIC8/SOIC16 clip. Your
|
|||
mileage may very, but WSON8 has the same pinout as SOIC8 so you might have some
|
||||
luck with that.
|
||||
|
||||
Intel D510MO/D410PT (vendor BIOS)
|
||||
-----------------------
|
||||
### Intel D510MO/D410PT (vendor BIOS)
|
||||
|
||||
See: [External flashing guide](spi.md) - both boards are compatible with
|
||||
the same image.
|
||||
|
||||
Gigabyte GA-G41M-ES2L (vendor BIOS)
|
||||
---------------------
|
||||
### Gigabyte GA-G41M-ES2L (vendor BIOS)
|
||||
|
||||
Internal flashing is possible, from factory BIOS to Canoeboot, but special
|
||||
steps are required.
|
||||
|
||||
See: [Gigabyte GA-G41M-ES2L installation guide](ga-g41m-es2l.md)
|
||||
|
||||
Acer G43T-AM3 (vendor BIOS)
|
||||
--------------------
|
||||
### Acer G43T-AM3 (vendor BIOS)
|
||||
|
||||
See: [Acer G43T-AM3](acer_g43t-am3.md)
|
||||
|
||||
MacBook 1,1 / 2,1 / iMac 5,2 (vendor BIOS)
|
||||
-------------------------
|
||||
### MacBook 1,1 / 2,1 / iMac 5,2 (vendor BIOS)
|
||||
|
||||
MacBook *1,1* requires [external flashing](spi.md). MacBook *2,1* can always
|
||||
be flashed internally. iMac 5,2 can be flashed internally.
|
||||
|
||||
Also check the [Macbook2,1 hardware page](macbook21.md)
|
||||
|
||||
ASUS KCMA-D8 / KGPE-D16 (vendor BIOS)
|
||||
--------------------------
|
||||
### ASUS KCMA-D8 / KGPE-D16 (vendor BIOS)
|
||||
|
||||
[You must flash it externally](spi.md) (DIP-8 section) - also look at
|
||||
the [KGPE-D16 hardware page](kgpe-d16.md).
|
||||
|
|
@ -291,8 +280,7 @@ Further information is available on the [KCMA-D8 page](kcma-d8.md).
|
|||
KGPE-D16 installation is essentially the same, with the same type of flash
|
||||
IC (DIP-8). Refer to the external flashing guide.
|
||||
|
||||
ASUS KFSN4-DRE (vendor BIOS)
|
||||
-------------------------
|
||||
### ASUS KFSN4-DRE (vendor BIOS)
|
||||
|
||||
This board uses LPC flash in a PLCC32 socket. This coreboot page shows an
|
||||
example of the push pin as a proof of concept:
|
||||
|
|
@ -303,13 +291,11 @@ See: [ASUS KFSN4-DRE guide](kfsn4-dre.md)
|
|||
Hot-swap the flash IC with another one while it's running, and flash it
|
||||
internally.
|
||||
|
||||
Intel D945GCLF (vendor BIOS)
|
||||
---------------------------------
|
||||
### Intel D945GCLF (vendor BIOS)
|
||||
|
||||
See: [Intel D945GCLF flashing guide](d945gclf.md)
|
||||
|
||||
ThinkPad T60/X60/X60Tablet/X60S
|
||||
-------------------------------
|
||||
### ThinkPad T60/X60/X60Tablet/X60S
|
||||
|
||||
Only the Intel GPU is compatible. Do not flash the ATI GPU models.
|
||||
|
||||
|
|
@ -402,8 +388,7 @@ bootblock, set bucts back to zero:
|
|||
The second flash can be done by simply following the general internal flashing
|
||||
guide further down on this page.
|
||||
|
||||
ARM-based Chromebooks
|
||||
---------------------
|
||||
### ARM-based Chromebooks
|
||||
|
||||
See: [Chromebook flashing instructions](chromebooks.md)
|
||||
|
||||
|
|
@ -412,8 +397,7 @@ the x86 machines, because the Chromebooks still use flashrom with
|
|||
the `-p host` argument instead of `-p internal` when flashing, and you typically
|
||||
need to flash externally, due to Google's security model.
|
||||
|
||||
QEMU (arm64 and x86)
|
||||
--------------------
|
||||
### QEMU (arm64 and x86)
|
||||
|
||||
Canoeboot can be used on QEMU (virtual machine), which is useful for debugging
|
||||
payloads and generally trying out Canoeboot, without requiring real hardware.
|
||||
|
|
@ -421,7 +405,7 @@ payloads and generally trying out Canoeboot, without requiring real hardware.
|
|||
See: [Canoeboot QEMU guide](../misc/emulation.md)
|
||||
|
||||
Install via host CPU (internal flashing)
|
||||
========================================
|
||||
----------------------------------------
|
||||
|
||||
NOTE: This mainly applies to the x86 machines.
|
||||
|
||||
|
|
@ -435,10 +419,9 @@ directly.
|
|||
Internal flashing is often unavailable with the factory firmware, but it is
|
||||
usually possible when Canoeboot is running (barring special circumstances).
|
||||
|
||||
Run flashprog on host CPU
|
||||
------------------------
|
||||
### Run flashprog on host CPU
|
||||
|
||||
### Flash chip size
|
||||
#### Flash chip size
|
||||
|
||||
Use this to find out:
|
||||
|
||||
|
|
@ -446,7 +429,7 @@ Use this to find out:
|
|||
|
||||
In the output will be information pertaining to your boot flash.
|
||||
|
||||
### Howto: read/write/erase the boot flash
|
||||
#### Howto: read/write/erase the boot flash
|
||||
|
||||
How to read the current chip contents:
|
||||
|
||||
|
|
@ -471,6 +454,3 @@ There is nothing to worry about.
|
|||
|
||||
If successful, it will either say `VERIFIED` or it will say that the chip
|
||||
contents are identical to the requested image.
|
||||
|
||||
NOTE: there are exceptions where the above is not possible. Read about them in
|
||||
the sections below:
|
||||
|
|
|
|||
|
|
@ -1,12 +1,16 @@
|
|||
---
|
||||
title: ASUS KCMA-D8 desktop/workstation board
|
||||
title: Install Canoeboot on ASUS KCMA-D8
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
TODO: this page is OLD. check that the info is still valid.
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
ASUS KCMA-D8 server/workstation motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
Specifications available here:
|
||||
<https://www.asus.com/uk/Commercial-Servers-Workstations/KCMAD8/>
|
||||
|
|
@ -36,7 +40,7 @@ If you currently have the ASUS firmware, please ignore the above link and
|
|||
instead refer to the section below:
|
||||
|
||||
Flashing
|
||||
========
|
||||
--------
|
||||
|
||||
The default ASUS firmware write-protects the flash, so you have to remove the
|
||||
chip and re-flash it using external hardware.
|
||||
|
|
@ -56,7 +60,7 @@ Refer to the following guide:\
|
|||
[Externally rewrite 25xx NOR flash via SPI protocol](../install/spi.md)
|
||||
|
||||
PCI option ROMs
|
||||
===============
|
||||
---------------
|
||||
|
||||
Unlike Libreboot 20160907, Canoeboot in newer releases now supports finding and
|
||||
loading PCI option ROMs automatically, both in GRUB and SeaBIOS on this machine.
|
||||
|
|
@ -66,21 +70,21 @@ So for example, if you wish to use an add-on graphics card, you can! It's no
|
|||
problem, and should work just fine.
|
||||
|
||||
CPU coolers
|
||||
===========
|
||||
-----------
|
||||
|
||||
With some creativity, standard AM3+ coolers will work fine.
|
||||
|
||||
2 x Socket C32 (LGA1207) available, so you can use 2 CPUs. (up to 32GiB per CPU)
|
||||
|
||||
CPU compatibility
|
||||
=================
|
||||
-----------------
|
||||
|
||||
- Opteron 4100 series: Incompatible
|
||||
- Opteron 4200 series: Compatible
|
||||
- Opteron 4300 series: Compatible
|
||||
|
||||
Board status (compatibility) {#boardstatus}
|
||||
============================
|
||||
-------------------------------------
|
||||
|
||||
There are two ways to identify a supported KCMA-D8 board:
|
||||
|
||||
|
|
@ -99,14 +103,14 @@ For more detailed information regarding the coreboot port, see
|
|||
<https://raptorengineeringinc.com/coreboot/kcma-d8-status.php>
|
||||
|
||||
Form factor {#formfactor}
|
||||
===========
|
||||
-----------------------
|
||||
|
||||
This board is ATX form factor. While the [ATX standard, version 2.2](https://web.archive.org/web/20120725150314/http://www.formfactors.org/developer/specs/atx2_2.pdf)
|
||||
specifies board dimensions 305mm x 244mm, this board measures 305mm x 253mm;
|
||||
please ensure that your case supports this extra ~cm in width.
|
||||
|
||||
IPMI iKVM module add-on {#ipmi}
|
||||
=======================
|
||||
----------------------------
|
||||
|
||||
Don't use it. It uses proprietary firmware and adds a backdoor (remote
|
||||
out-of-band management chip, similar to the [Intel Management
|
||||
|
|
@ -116,7 +120,7 @@ mainboard since it's on the add-on module, which you don't have to
|
|||
install.
|
||||
|
||||
Flash chips {#flashchips}
|
||||
===========
|
||||
-----------------------
|
||||
|
||||
2MiB flash chips are included by default, on these boards. It's on a
|
||||
P-DIP 8 slot (SPI chip). The flash chip can be upgraded to higher sizes:
|
||||
|
|
@ -133,7 +137,7 @@ Ideally, you should not hot-swap. Only remove the IC when the system is
|
|||
powered down and disconnected from mains.
|
||||
|
||||
Native graphics initialization {#graphics}
|
||||
==============================
|
||||
-----------------------------------------
|
||||
|
||||
Only text-mode is known to work, but linux(kernel) can initialize the
|
||||
framebuffer display (if it has KMS - kernel mode setting).
|
||||
|
|
@ -147,7 +151,7 @@ because the Nouveau driver can't increase the GPU clock (it doesn't know how,
|
|||
as of 18 March 2021).
|
||||
|
||||
Current issues {#issues}
|
||||
==============
|
||||
----------------------
|
||||
|
||||
- Opteron 4100 series CPUs are currently incompatible
|
||||
- LRDIMM memory modules are currently incompatible
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: ASUS KFSN4-DRE server/workstation board
|
||||
title: Install Canoeboot on ASUS KFSN4-DRE
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
|
|
@ -18,7 +18,7 @@ x-toc-enable: true
|
|||
| **Graphics** | XGI Z9s VGA Controller |
|
||||
| **Display** | None. |
|
||||
| **Memory** | 512MB, 1GB, 2GB, 4GB |
|
||||
| **Architecture** | x86_64 |
|
||||
| **Architecture** | x86\_64 |
|
||||
| **Original boot firmware** | AMIBIOS |
|
||||
| **Intel ME/AMD PSP** | Not present. |
|
||||
| **Flash chip** | PLCC 1MiB (Upgradable to 2MiB) |
|
||||
|
|
@ -46,6 +46,13 @@ P+: Partially works;
|
|||
| **SeaBIOS with GRUB** | Partially works |
|
||||
</div>
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
ASUS KFSN4-DRE server/workstation motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
This is a server board using AMD hardware (Fam10h). It can also be used
|
||||
for building a high-powered workstation. Powered by Canoeboot.
|
||||
|
||||
|
|
@ -56,14 +63,14 @@ NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog
|
|||
now, as of 3 May 2024, which is a fork of flashrom.
|
||||
|
||||
Form factor {#formfactor}
|
||||
===========
|
||||
---------------------
|
||||
|
||||
These boards use the SSI EEB 3.61 form factor; make sure that your case
|
||||
supports this. This form factor is similar to E-ATX in that the size is
|
||||
identical, but the position of the screws are different.
|
||||
|
||||
Flash chips {#flashchips}
|
||||
===========
|
||||
-----------------------
|
||||
|
||||
These boards use LPC flash (not SPI), in a PLCC socket. The default
|
||||
flash size 1MiB (8Mbits), and can be upgraded to 2MiB (16Mbits).
|
||||
|
|
@ -76,18 +83,18 @@ extractor. These can be found online. See
|
|||
<http://www.coreboot.org/Developer_Manual/Tools#Chip_removal_tools>*
|
||||
|
||||
Native graphics initialization {#graphics}
|
||||
==============================
|
||||
---------------------------------------
|
||||
|
||||
Native graphics initialization exists (XGI Z9s) for this board.
|
||||
Framebuffer- and text-mode both work. A serial port is also available.
|
||||
|
||||
Memory
|
||||
======
|
||||
-------
|
||||
|
||||
DDR2 533/667 Registered ECC. 16 slots. Total capacity up to 64GiB.
|
||||
|
||||
Hex-core CPUs {#hexcore}
|
||||
=============
|
||||
---------------------
|
||||
|
||||
PCB revision 1.05G is the latest version of this board and the best one
|
||||
(the revision number is be printed on the board), if you want to use
|
||||
|
|
@ -101,7 +108,8 @@ To be sure your board supports a CPU check the official ASUS website here:
|
|||
If you are running a Hex-Core CPU on any board version, please contact us.
|
||||
|
||||
Board configurations {#configurations}
|
||||
==============
|
||||
----------------------------------------
|
||||
|
||||
There are 7 different configurations of this board: "standard", 2S, iKVM,
|
||||
iKVM/IST, SAS, SAS/iKVM and SAS/iKVM/IST.
|
||||
|
||||
|
|
@ -120,7 +128,7 @@ The IST versions with PCB revision 1.05G are the ones who are believed to
|
|||
support the six core Opteron Istanbul processors (2400 and 8400 series).
|
||||
|
||||
Current issues {#issues}
|
||||
==============
|
||||
-----------------------
|
||||
|
||||
- There seems to be a 30 second bootblock delay (observed by
|
||||
tpearson); the system otherwise boots and works as expected. See
|
||||
|
|
@ -147,7 +155,7 @@ Current issues {#issues}
|
|||
the USB booting doesn't work.
|
||||
|
||||
Other information
|
||||
=================
|
||||
------------------
|
||||
|
||||
[specifications](https://web.archive.org/web/20181212180051/http://ftp.tekwind.co.jp/pub/asustw/mb/Socket%20F/KFSN4-DRE/Manual/e3335_kfsn4-dre.pdf)
|
||||
|
||||
|
|
|
|||
|
|
@ -3,10 +3,17 @@ title: ASUS KGPE-D16 server/workstation board
|
|||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
ASUS KGPE-D16 server/workstation motherboard. Libreboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
TODO: OLD page. TODO: check that all the info is still valid.
|
||||
|
||||
Introduction
|
||||
============
|
||||
Free your BIOS today!
|
||||
---------------------
|
||||
|
||||
This is a server board using AMD hardware (Fam10h *and Fam15h* CPUs
|
||||
available). It can also be used for building a high-powered workstation.
|
||||
|
|
@ -26,24 +33,24 @@ possible to re-flash using software running in Linux on the
|
|||
KGPE-D16, without using external hardware.
|
||||
|
||||
CPU compatibility
|
||||
=================
|
||||
-----------------
|
||||
|
||||
Opteron 62xx and 63xx CPUs work just fine.
|
||||
|
||||
Board status (compatibility) {#boardstatus}
|
||||
============================
|
||||
---------------------
|
||||
|
||||
See <https://raptorengineeringinc.com/coreboot/kgpe-d16-status.php>.
|
||||
|
||||
Form factor {#formfactor}
|
||||
===========
|
||||
----------------------
|
||||
|
||||
These boards use the SSI EEB 3.61 form factor; make sure that your case
|
||||
supports this. This form factor is similar to E-ATX in that the size is
|
||||
identical, but the position of the screws are different.
|
||||
|
||||
IPMI iKVM module add-on {#ipmi}
|
||||
=======================
|
||||
--------------------------
|
||||
|
||||
Don't use it. It uses proprietary firmware and adds a backdoor (remote
|
||||
out-of-band management chip, similar to the [Intel Management
|
||||
|
|
@ -53,7 +60,7 @@ mainboard since it's on the add-on module, which you don't have to
|
|||
install.
|
||||
|
||||
Flash chips {#flashchips}
|
||||
===========
|
||||
--------------------------
|
||||
|
||||
2MiB flash chips are included by default, on these boards. It's on a
|
||||
P-DIP 8 slot (SPI chip). The flash chip can be upgraded to higher sizes:
|
||||
|
|
@ -72,13 +79,13 @@ This guide shows how to flash the chip:\
|
|||
[25xx NOR flashing guide](../install/spi.md)
|
||||
|
||||
Native graphics initialization {#graphics}
|
||||
==============================
|
||||
----------------------------------
|
||||
|
||||
Only text-mode is known to work, but linux(kernel) can initialize the
|
||||
framebuffer display (if it has KMS - kernel mode setting).
|
||||
|
||||
Current issues {#issues}
|
||||
==============
|
||||
----------------------------------
|
||||
|
||||
- LRDIMM memory modules are currently incompatible
|
||||
(IT MAY WORK NOWADAYS, TODO TEST)
|
||||
|
|
|
|||
|
|
@ -1,14 +1,26 @@
|
|||
---
|
||||
title: Flashing Canoeboot on Dell Latitude laptops
|
||||
title: Install Canoeboot on Dell Latitude laptops
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on various models of
|
||||
Dell Latitude laptop motherboard, namely Dell Latitude E4300, E6400, E6400 XFR,
|
||||
E6400 ATG; you must only install Canoeboot on models with *Intel graphics*.
|
||||
Canoeboot replaces proprietary BIOS/UEFI firmware.
|
||||
|
||||
In case any models are unlisted in the above paragraph, you should also check
|
||||
the full list of supported Dell Latitude models on the [Canoeboot hardware
|
||||
compatibility](./#which-systems-are-supported-by-canoeboot) page.
|
||||
|
||||
All of the Dell Latitude models can be flashed internally, which means that
|
||||
you do not need to disassemble them. You can do it from Linux or BSD, using
|
||||
the instructions on this page.
|
||||
|
||||
Disable security before flashing
|
||||
================================
|
||||
--------------------------------
|
||||
|
||||
Please also [disable /dev/mem protection](devmem.md), otherwise flashprog
|
||||
and dell-flash-unlock won't work. You can re-enable the protections after
|
||||
|
|
@ -19,13 +31,13 @@ Note that Canoeboot does not currently implement UEFI on x86 platforms, but
|
|||
you can set up [Secure canoeBoot](../linux/grub_hardening.md) after flashing.
|
||||
|
||||
MAC address
|
||||
===========
|
||||
-----------
|
||||
|
||||
Make sure to set your own MAC address in the ROM image before flashing.
|
||||
Please read the [nvmutil manual](nvmutil.md) which says how to do this.
|
||||
|
||||
Thermal safety
|
||||
==============
|
||||
--------------
|
||||
|
||||
**Thermal safety**: this machine shuts down very quickly, when the machine
|
||||
exceeds 80c CPU temperature, which is far more conservative than on most
|
||||
|
|
@ -34,17 +46,23 @@ excellent. More info available [here](../install/dell_thermal.md). This is a
|
|||
known bug, but otherwise the machine will be mostly stable.
|
||||
|
||||
Machine-specific notes
|
||||
======================
|
||||
----------------------
|
||||
|
||||
dGPU variants
|
||||
-------------
|
||||
### Latitude E6400
|
||||
|
||||
Vendor files not required for Dell Latitude E6400 if you have the Intel GPU.
|
||||
|
||||
If you have the Nvidia model, please use the `e6400nvidia_4mb` target, and
|
||||
make sure to run the [inject script](ivy_has_common.md) prior to flashing.
|
||||
|
||||
### dGPU variants
|
||||
|
||||
Only the models with Intel graphics are supported in Canoeboot, since these
|
||||
can be booted with free graphics initialisation, whereas the discrete GPUs
|
||||
require binary blobs which are not allowed in Canoeboot.
|
||||
|
||||
Internal flashing
|
||||
=================
|
||||
-----------------
|
||||
|
||||
You can simply boot Linux or BSD, on the Dell Latitude you wish to flash,
|
||||
and run `flashprog` from there, for Canoeboot installation. Certain other steps
|
||||
|
|
@ -105,12 +123,11 @@ successful. If you don't see that, or you're unsure, please [contact the
|
|||
Canoeboot project via IRC](../../contact.md).
|
||||
|
||||
External flashing
|
||||
=================
|
||||
-----------------
|
||||
|
||||
General guidance
|
||||
----------------
|
||||
### General guidance
|
||||
|
||||
Machine-specific disassembly instructions not provided, but you can find
|
||||
Machine-specific disassembly instructions are not provided, but you can find
|
||||
the hardware maintenance manual for your Latitude module online. Just search
|
||||
for it. The flash chips(s) is/are usually under the keyboard/palmrest. Near
|
||||
to the PCH/southbridge.
|
||||
|
|
@ -128,10 +145,9 @@ Please read the [external SPI flash guide](spi.md)
|
|||
|
||||
External flashing is usually not required, on these machines.
|
||||
|
||||
Chip size guidance
|
||||
------------------
|
||||
### Chip size guidance
|
||||
|
||||
SOme Dell Latitudes use a single flash chip, so you can
|
||||
Some Dell Latitudes use a single flash chip, so you can
|
||||
just use the ROM images as-is.
|
||||
|
||||
If there are two flash chips, you must split the ROM images. Check the silk
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ x-toc-enable: true
|
|||
...
|
||||
|
||||
Introduction (GM45+e1000)
|
||||
=========================
|
||||
-------------------------
|
||||
|
||||
This section is applicable to all supported laptops with the
|
||||
mobile 4 series chipset (as shown in `$ lspci`)
|
||||
|
|
@ -17,15 +17,11 @@ for the built-in gigabit ethernet controller is stored inside the flash chip,
|
|||
along with Canoeboot and other configuration data. Therefore, installing
|
||||
Canoeboot will overwrite it.
|
||||
|
||||
Thus, for these laptops, prebuilt Canoeboot already contains a generic
|
||||
MAC address in the configuration section. This address is `00:f5:f0:40:71:fe
|
||||
in builds before 2018-01-16 and `00:4c:69:62:72:65` (see the ascii character
|
||||
set) afterwards.
|
||||
Thus, for these laptops, prebuilt Canoeboot images already contain a generic
|
||||
MAC address in the GbE region.
|
||||
Unless you change it, your computer will boot and use it. This can lead
|
||||
to network problems if you have more than one Canoeboot computer on
|
||||
the same layer2 network (e.g. on the same network switch). The switch
|
||||
(postman) will simply not know who to deliver to as the MAC (house) addresses
|
||||
will be the same.
|
||||
the same layer2 network (e.g. on the same network switch).
|
||||
|
||||
To prevent these address clashes, you can either modify prebuilt Canoeboot
|
||||
to use an address of your own choosing or you can change the address in your
|
||||
|
|
@ -35,7 +31,7 @@ In either case, it is a good idea to write down the address that your
|
|||
computer originally had.
|
||||
|
||||
Obtaining the existing MAC address
|
||||
==================================
|
||||
----------------------------------
|
||||
|
||||
The existing MAC address may be obtained by the following methods:
|
||||
|
||||
|
|
@ -65,7 +61,7 @@ The existing MAC address may be obtained by the following methods:
|
|||
updated.
|
||||
|
||||
Changing the MAC address in the operating system
|
||||
================================================
|
||||
------------------------------------------------
|
||||
|
||||
There are three portable ways of doing so:
|
||||
|
||||
|
|
@ -90,8 +86,8 @@ init scripts or you can use your operating system's own networking
|
|||
configuration. Refer to your operating system's documentation for
|
||||
how to do this.
|
||||
|
||||
Changing the MAC address on X200/T400/T500/W500
|
||||
===============================================
|
||||
Changing the MAC address on X200/T400/T500/W500 (OBSOLETE)
|
||||
-----------------------------------------------
|
||||
|
||||
On GM45 laptops with ICH9M southbridge and Intel PHY module, the MAC address
|
||||
is hardcoded in boot flash, which means it can be changed if you re-flash.
|
||||
|
|
@ -101,8 +97,26 @@ See [ich9utils documentation](../install/ich9utils.md)
|
|||
If *all* you want to do is change the MAC address, you might try `nvmutil`
|
||||
instead. See notes below:
|
||||
|
||||
Also see [nvmutil documentation](../install/nvmutil.md)
|
||||
Changing the MAC address via nvmutil
|
||||
-----------------------------------------------------------------
|
||||
|
||||
The nvmutil utility is yet another utility provided by Canoeboot, for
|
||||
changing your MAC address. It is a standalone utility, that operates
|
||||
only on pre-assembled GbE files.
|
||||
Nowadays, nvmutil is the preferred way to do it, instead of ich9gen.
|
||||
|
||||
See [nvmutil documentation](../install/nvmutil.md)
|
||||
|
||||
This tool was originally written for changing the MAC address on Intel
|
||||
Sandybridge, Ivybridge and Haswell platforms, but it can be used on any
|
||||
platform with a valid GbE region in flash, where an Intel Flash Descriptor
|
||||
is used; this includes older GM45+ICH9M machines supported by Canoeboot.
|
||||
|
||||
The `ich9utils` program is more useful in an cbmk context, because it
|
||||
generates an entire Intel Flash Descriptor and GbE region from scratch;
|
||||
coreboot has a similar method in its build system, using its own utility
|
||||
called bincfg, but this tool is unused in cbmk.
|
||||
|
||||
No tool like ich9utils exists for these boards yet, but cbmk includes the IFD
|
||||
and GbE files in-tree.
|
||||
|
||||
You can use `nvmutil` to change the existing MAC address in a GbE region. This
|
||||
sets the "hardcoded" MAC address, typically a globally assigned one set by
|
||||
the vendor, but you can use local addresses, and you can use randomised MACs.
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: MacBook2,1 and MacBook1,1
|
||||
title: Install Canoeboot on MacBook2,1 and MacBook1,1
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
|
|
@ -20,7 +20,7 @@ x-toc-enable: true
|
|||
| **Graphics** | Intel GMA 950 |
|
||||
| **Display** | 1280x800 TFT |
|
||||
| **Memory** | 512MB, 1GB (upgradable to 4GB with 3GB usable) |
|
||||
| **Architecture** | x86_64 |
|
||||
| **Architecture** | x86\_64 |
|
||||
| **EC** | Proprietary |
|
||||
| **Original boot firmware** | Apple EFI |
|
||||
| **Intel ME/AMD PSP** | Not present. |
|
||||
|
|
@ -48,6 +48,14 @@ P+: Partially works;
|
|||
| **SeaBIOS** | Works |
|
||||
| **SeaBIOS with GRUB** | Works |
|
||||
</div>
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
-------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Apple MacBook 2,1 2005-2007 laptop motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
The MacBook1,1 and MacBook2,1 are very similar to the
|
||||
ThinkPad X60. It shares some hardware with the X60 such as the chipset.
|
||||
|
||||
|
|
@ -61,15 +69,14 @@ uses Core Duo processors (supports 32-bit OS but not 64-bit), and it is
|
|||
believed that this is the only difference.
|
||||
|
||||
Compatibility
|
||||
=============
|
||||
-------------
|
||||
|
||||
The following pages list many models of MacBook1,1 and MacBook2,1:
|
||||
|
||||
* <http://www.everymac.com/ultimate-mac-lookup/?search_keywords=MacBook1,1>
|
||||
* <http://www.everymac.com/ultimate-mac-lookup/?search_keywords=MacBook2,1>
|
||||
|
||||
Models
|
||||
------
|
||||
### Models
|
||||
|
||||
Specifically (Order No. / Model No. / CPU) for the MacBook1,1:
|
||||
|
||||
|
|
@ -97,7 +104,7 @@ then don't forget to [send a patch](../../git.md), confirming that it
|
|||
actually works!
|
||||
|
||||
Internal flashing
|
||||
=================
|
||||
-----------------
|
||||
|
||||
MacBook2,1 can always be flashed internally, even if running Apple firmware:
|
||||
|
||||
|
|
@ -110,7 +117,7 @@ The MacBook1,1 can't be flashed internally if running the Apple EFI firmware.
|
|||
You must flash externally.
|
||||
|
||||
External flashing
|
||||
=================
|
||||
-----------------
|
||||
|
||||
MacBook1,1 requires external flashing, if running the default Apple firmware.
|
||||
MacBook2,1 can be flashed internally, regardless.
|
||||
|
|
@ -130,7 +137,7 @@ Refer to the following guide:\
|
|||
[Externally rewrite 25xx NOR flash via SPI protocol](../install/spi.md)
|
||||
|
||||
OSes using Linux on Apple EFI firmware
|
||||
======================================
|
||||
--------------------------------------
|
||||
|
||||
You have 2 choices for booting up OSes using Linux as their kernel
|
||||
on the MacBook:
|
||||
|
|
@ -139,8 +146,7 @@ on the MacBook:
|
|||
|
||||
* Boot via a CD or DVD.
|
||||
|
||||
Boot via a CD or DVD
|
||||
--------------------
|
||||
### Boot via a CD or DVD
|
||||
|
||||
The Apple EFI firmware contains a PC BIOS emulation layer for booting
|
||||
Microsoft Windows on CDs and DVDs. That emulation layer **only** works
|
||||
|
|
@ -170,8 +176,7 @@ should boot up properly automatically.
|
|||
to it using GRUB, despite the fact that it does sometimes show up. You
|
||||
also won't be able to boot it up when using Canoeboot.*
|
||||
|
||||
Boot via USB
|
||||
------------
|
||||
### Boot via USB
|
||||
|
||||
This method is harder than booting from a CD/DVD and may soft-brick your
|
||||
MacBook but it's the only way to boot up successfully from a USB.
|
||||
|
|
@ -209,14 +214,14 @@ the CMOS/PRAM battery, wait a few minutes, and put it back in.
|
|||
to reconfigure GRUB2 correctly, else your system won't boot.*
|
||||
|
||||
Coreboot wiki page
|
||||
==================
|
||||
------------------
|
||||
|
||||
The following page has some information:
|
||||
|
||||
* <https://www.coreboot.org/Board:apple/macbook21>
|
||||
|
||||
Issues and solutions/workarounds
|
||||
================================
|
||||
--------------------------------
|
||||
|
||||
There is one mouse button only, however multiple finger tapping
|
||||
works. The Apple logo on the
|
||||
|
|
@ -227,8 +232,7 @@ should [cover it up](http://cweiske.de/tagebuch/tuxbook.htm).
|
|||
software. Webcams are a privacy and security risk; cover it up! Or
|
||||
remove it.*
|
||||
|
||||
Make it overheat less
|
||||
---------------------
|
||||
### Make it overheat less
|
||||
|
||||
NOTE: in Canoeboot, this section is less relevant, because C3
|
||||
states are now; the issue pertained to much older releases of [Libreboot](https://libreboot.org/),
|
||||
|
|
@ -269,8 +273,7 @@ PLATFORM_PROFILE_ON_BAT=low-power
|
|||
|
||||
The MacBook will still overheat, just less.
|
||||
|
||||
Enable AltGr
|
||||
------------
|
||||
### Enable AltGr
|
||||
|
||||
The keyboard has a keypad enter instead of an AltGr. The first key on
|
||||
the right side of the spacebar is the Apple "command" key. On its
|
||||
|
|
@ -294,12 +297,11 @@ line:
|
|||
|
||||
to the file /etc/vconsole.conf and then restart the computer.
|
||||
|
||||
Make touchpad more responsive
|
||||
-----------------------------
|
||||
### Make touchpad more responsive
|
||||
|
||||
Linux kernels of version 3.15 or lower might make the touchpad
|
||||
extremely sluggish. A user reported that they could get better
|
||||
response from the touchpad with the following in their xorg.conf:
|
||||
response from the touchpad with the following in their `xorg.conf`:
|
||||
|
||||
```
|
||||
Section "InputClass"
|
||||
|
|
|
|||
|
|
@ -1,45 +1,35 @@
|
|||
---
|
||||
title: nvmutil manual
|
||||
title: nvmutil usage instructions
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
With this software, you can change the MAC address inside GbE regions
|
||||
on any system that uses an Intel Flash Descriptor.
|
||||
on any system that uses an Intel Flash Descriptor. This software works well
|
||||
on most/all of the major Linux or BSD operating systems.
|
||||
|
||||
You can use the documentation below, if you wish to use `nvmutil` manually.
|
||||
Continue reading...
|
||||
|
||||
Introduction
|
||||
============
|
||||
Change the Intel GbE MAC address
|
||||
--------------------------------
|
||||
|
||||
This is the manual for `nvmutil`, included in the Canoeboot,
|
||||
build system (cbmk) under `util/nvmutil/`. This program lets you modify
|
||||
the MAC address, correct/verify/invalidate checksums,
|
||||
swap/copy and dump regions on Intel PHY NVM images,
|
||||
which are small binary configuration files that go
|
||||
in flash, for Gigabit (ethernet) Intel NICs.
|
||||
This is the manual for `nvmutil`, included within the [Canoeboot build
|
||||
system](../maintain/) (cbmk) under `util/nvmutil/`. This program lets you modify
|
||||
the MAC address, correct/verify/invalidate checksums, swap/copy and dump regions
|
||||
on Intel PHY NVM images, which are small binary configuration files that go in
|
||||
flash, for Gigabit (ethernet) Intel NICs.
|
||||
|
||||
**Please [install build dependencies](../build/) before you do this.**
|
||||
|
||||
This software is largely targeted at coreboot users,
|
||||
but it can be used on most modern Intel systems, or
|
||||
most systems from about 2008/2009 onwards.
|
||||
This software is largely targeted at coreboot users, but it can be used on most
|
||||
modern Intel systems, or most systems from about 2008/2009 onwards, regardless
|
||||
of which boot firmware they have.
|
||||
|
||||
NOTE: Canoeboot X200/X200T/X200S/T400/T400S/T500/W500/R400
|
||||
users should know that this software does *not*
|
||||
replace `ich9gen`, because that program generates entire
|
||||
ICH9M IFD+GbE regions, in addition to letting you set the
|
||||
MAC address. *This* program, `nvmutil`, can *also* set
|
||||
the MAC address on those machines, but it operates on a
|
||||
single GbE dump that is already created.
|
||||
|
||||
This program is operated on dumps of the GbE NVM image,
|
||||
which normally goes in the boot flash (alongside BIOS/UEFI
|
||||
or coreboot, IFD and other regions in the flash). The first
|
||||
half of this README is dedicated to precisely this, telling
|
||||
you how to dump or otherwise acquire that file; the second
|
||||
half of this README then tells you how to operate on it,
|
||||
using `nvmutil`.
|
||||
This program is operated on dumps of the GbE NVM image, which normally goes in
|
||||
the boot flash (alongside BIOS/UEFI or coreboot, IFD and other regions in
|
||||
the flash). The first half of this README is dedicated to precisely this,
|
||||
telling you how to dump or otherwise acquire that file; the second half of this
|
||||
README then tells you how to operate on it, using `nvmutil`.
|
||||
|
||||
Automatic MAC address changer
|
||||
-----------------------------
|
||||
|
|
@ -70,7 +60,13 @@ is provided without argument, or no argument is given, the MAC address is
|
|||
randomised. Otherwise, you can specify an arbitrary address.
|
||||
|
||||
The `?` character is random, and you can specify that any of them be random,
|
||||
while setting others (or all of them) arbitrarily.
|
||||
while setting others (or all of them) arbitrarily. On the corresponding nibble,
|
||||
the bit for unicast/multicast and global/local are set accordingly, so that
|
||||
randomly generated addresses are *always* unicast and *local*, unless the
|
||||
corresponding nibble is set arbitrarily; if the latter, then an error is thrown
|
||||
if the arbitrary nibble corresponds to a multicast MAC address (and when errors
|
||||
are thrown, the file shall remain unchanged). More information about error
|
||||
handling is provided, later in this document.
|
||||
|
||||
The `restore` option restores the original one. The command works by using a
|
||||
reference GbE image file present in Canoeboot's build system, for the given
|
||||
|
|
@ -80,7 +76,7 @@ The Canoeboot version is designed to throw an error, if you run it on a Libreboo
|
|||
tarball.
|
||||
|
||||
How to download newer versions
|
||||
==============================
|
||||
------------------------------
|
||||
|
||||
Simply pull down the latest changes in `cbmk.git`. The `nvmutil`
|
||||
software is part of our Canoeboot build system, which we called `cbmk`,
|
||||
|
|
@ -91,7 +87,7 @@ More info about git:
|
|||
* <https://git-scm.com/>
|
||||
|
||||
Context
|
||||
=======
|
||||
-------
|
||||
|
||||
On many Intel systems with an IFD (Intel Flash Descriptor), the
|
||||
Intel PHY (Gigabit Ethernet) stores its configuration, binary
|
||||
|
|
@ -122,8 +118,7 @@ This 4KB region is then repeated, to make an 8KB region in
|
|||
flash, known as the *GbE region*. In `nvmutil`, the first part
|
||||
is referred to as *part 0* and the second part as *part 1*.
|
||||
|
||||
Known compatible PHYs
|
||||
---------------------
|
||||
### Known compatible PHYs
|
||||
|
||||
TODO: write a full list her ofe what actual PHYs are known to work.
|
||||
|
||||
|
|
@ -136,7 +131,7 @@ files; it is assumed that intel would later change the
|
|||
file size and/or checksum value and/or checksum location.
|
||||
|
||||
How to obtain the GbE file
|
||||
==========================
|
||||
--------------------------
|
||||
|
||||
The chip containing your BIOS/UEFI firmware (or coreboot) has
|
||||
it, if you have an Intel PHY for gigabit ethernet.
|
||||
|
|
@ -146,8 +141,7 @@ containing your NIC's configuration. This is the part that
|
|||
many people will struggle with, so we will dedicated an
|
||||
entire next section to it:
|
||||
|
||||
Use flashprog
|
||||
------------
|
||||
### Use flashprog
|
||||
|
||||
NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog)
|
||||
now, as of 3 May 2024, which is a fork of flashrom.
|
||||
|
|
@ -194,8 +188,7 @@ option should be changed accordingly. Read flashprog
|
|||
documentation, and make sure you have everything
|
||||
properly configured.
|
||||
|
||||
Use ifdtool
|
||||
-----------
|
||||
### Use ifdtool
|
||||
|
||||
NOTE: This has only been tested on systems that use IFDv1
|
||||
(Intel Flash Descriptor, version 1). This distinction, between
|
||||
|
|
@ -308,7 +301,7 @@ SPI1. You should adjust the above parameters, according
|
|||
to your configuration.
|
||||
|
||||
How to compile source code
|
||||
==========================
|
||||
--------------------------
|
||||
|
||||
The nvmutil source code is located under `util/nvmutil/` in the
|
||||
cbmk repository. A makefile is included there, for you to build an
|
||||
|
|
@ -333,8 +326,7 @@ The `nvmutil` software has been build-tested on `Clang`, `GCC`
|
|||
and `tcc`. Only standard library functions (plus `err.h`) are
|
||||
used, so you don't need any extra libraries.
|
||||
|
||||
How to compile it
|
||||
-----------------
|
||||
### How to compile nvmutil
|
||||
|
||||
First, ensure that the current working directory is your
|
||||
copy of the nvmutil source code!
|
||||
|
|
@ -350,7 +342,7 @@ whatever is in your `$PATH` for userspace programs).
|
|||
TODO: Add `make install` to the Makefile, portably.
|
||||
|
||||
How to use nvmutil
|
||||
==================
|
||||
------------------
|
||||
|
||||
You run it, passing as argument the path to a file, and you run
|
||||
commands on that file. This section will tell you how to
|
||||
|
|
@ -362,8 +354,7 @@ done that, you could still run it in cwd for instance:
|
|||
|
||||
./nvm bla bla bla
|
||||
|
||||
Exit status
|
||||
-----------
|
||||
### Exit status
|
||||
|
||||
The `nvmutil` program uses `errno` extensively. The best error
|
||||
handling is done this way, the Unix way. Error handling is extremely
|
||||
|
|
@ -389,8 +380,7 @@ of size *8KB*.
|
|||
Additional rules regarding exit status shall apply, depending on
|
||||
what command you use. Commands are documented in the following sections:
|
||||
|
||||
Change MAC address
|
||||
------------------
|
||||
### Change MAC address
|
||||
|
||||
The `nvm` program lets you change the MAC address. It sets
|
||||
a valid checksum, after changing the MAC address. This program
|
||||
|
|
@ -455,8 +445,7 @@ corrected if you use the `setchecksum` command
|
|||
in `nvmutil`. It is common for vendor gbe files to contain
|
||||
one valid part and one invalid part, per checksum rules.
|
||||
|
||||
Verify checksums (and show MAC addresses)
|
||||
-----------------------------------------
|
||||
### Verify checksums (and show MAC addresses)
|
||||
|
||||
This command *only* requires *read* access on files.
|
||||
|
||||
|
|
@ -472,8 +461,7 @@ NOTE: This will exit with zero status if at least one part
|
|||
contains a valid checksum. If both parts are invalid, nvmutil
|
||||
will exit with non-zero status.
|
||||
|
||||
Copy part
|
||||
---------
|
||||
### Copy part
|
||||
|
||||
This command requires read *and* write access on files.
|
||||
|
||||
|
|
@ -493,8 +481,7 @@ will be performed, and nvmutil will exit with non-zero status.
|
|||
Otherwise, it will (if all other conditions are met) exit with
|
||||
zero status.
|
||||
|
||||
Swap parts
|
||||
----------
|
||||
### Swap parts
|
||||
|
||||
This command requires read *and* write access on files.
|
||||
|
||||
|
|
@ -513,8 +500,7 @@ If *at least one* part is valid, nvmutil will return
|
|||
with zero exit status. If both parts are invalid, it will
|
||||
return non-zero.
|
||||
|
||||
Set valid checksum
|
||||
------------------
|
||||
### Set valid checksum
|
||||
|
||||
This command requires read *and* write access on files.
|
||||
|
||||
|
|
@ -534,8 +520,7 @@ set the checksum. There is no feasible way to guard against
|
|||
use on the wrong file, unlike with the other commands. Please
|
||||
make SURE you're running this on the correct file!*
|
||||
|
||||
Set invalid checksum
|
||||
--------------------
|
||||
### Set invalid checksum
|
||||
|
||||
This command requires read *and* write access on files.
|
||||
|
||||
|
|
@ -563,3 +548,12 @@ run `brick` before running `setmac` (or run it afterwards).
|
|||
The Linux kernel's `e1000` driver will refuse to initialise
|
||||
Intel gigabit NICs that don't have a valid checksum. This
|
||||
is software-defined, and not enforced by the hardware.
|
||||
|
||||
TODO
|
||||
----
|
||||
|
||||
* Support higher block sizes e.g. 8KB blocks for GbE part sections
|
||||
* Adapt this into a manpage (useful for Linux package repositories / BSD ports)
|
||||
* Send nvmutil upstream to coreboot, for inclusion under `util/`
|
||||
* In addition to the manpage, when sending to coreboot, also adapt this page
|
||||
for inclusion into doc.coreboot.org
|
||||
|
|
|
|||
|
|
@ -27,16 +27,16 @@ if you want it to, and you can!
|
|||
| **Original boot firmware** | Sony PS1 BIOS (USA/JPN/EU) |
|
||||
| **Flash chip** | 512KB Mask ROM |
|
||||
</div>
|
||||
Introduction
|
||||
============
|
||||
|
||||
Open source playstation (PS1/PSX) BIOS
|
||||
---------------------------------
|
||||
|
||||
This uses the free/opensource BIOS developed by the PCSX-Redux team, which you
|
||||
can learn more about here:
|
||||
|
||||
<https://github.com/grumpycoders/pcsx-redux/tree/main/src/mips/openbios>
|
||||
|
||||
Build from source
|
||||
-----------------
|
||||
### Build from source
|
||||
|
||||
Canoeboot's build system provides automation for this. Please use the latest cbmk
|
||||
revision [from Git](../../git.md).
|
||||
|
|
@ -65,7 +65,7 @@ This commonly only builds the BIOS part. If you want to build all of PCSX-Redux,
|
|||
you can, but cbmk does not provide automation for this.
|
||||
|
||||
Installation
|
||||
============
|
||||
------------
|
||||
|
||||
If all went well, you should see `openbios.bin` located
|
||||
under the `bin/playstation/` (within cbmk). Alternatively, you may be using
|
||||
|
|
@ -73,8 +73,7 @@ a release *after* Canoeboot 20240612 that has it pre-built. Either way is fine.
|
|||
|
||||
The `openbios.bin` file is your new BIOS build.
|
||||
|
||||
Emulators
|
||||
---------
|
||||
### Emulators
|
||||
|
||||
Most PlayStation emulators rely on low-level emulation to execute the real BIOS.
|
||||
The Open BIOS by PCSX-Redux (as distributed by Canoeboot) can also be used, and
|
||||
|
|
@ -89,8 +88,7 @@ provided with your chosen PlayStation emulator. You can even freely
|
|||
redistribute this BIOS, because it's free software (released under MIT license),
|
||||
which is a major advantage over Sony's original BIOS.
|
||||
|
||||
Hardware
|
||||
--------
|
||||
### Hardware
|
||||
|
||||
Not yet tested by the Canoeboot project, but the PCSX-Redux developers have
|
||||
stated that it will work on the real console. *It should be noted that the Open
|
||||
|
|
@ -114,7 +112,7 @@ BIOS much more polished, but a number of games have been tested and it's more
|
|||
or less fully reliable in most cases.
|
||||
|
||||
Game compatibility
|
||||
==================
|
||||
------------------
|
||||
|
||||
The upstream maintains a compatibility list, here:
|
||||
|
||||
|
|
@ -124,7 +122,7 @@ NOTE: Google Docs, but an option exists on there to export it for LibreOffice
|
|||
Calc. The list is provided as a spreadsheet.
|
||||
|
||||
Remarks about hardware
|
||||
====================
|
||||
----------------------
|
||||
|
||||
Modern NOR flash can be used. You specifically want a TSOP-32 SMD/SMT type device,
|
||||
one that operates at 3.3v (tolerance 2.7 to 3.6v), organised into 512KB blocks,
|
||||
|
|
@ -144,10 +142,9 @@ We do not yet provide instructions for how to install this on real hardware, in
|
|||
the Canoeboot project, but this can be done at a future date.
|
||||
|
||||
Other mods (hardware)
|
||||
===============
|
||||
---------------------
|
||||
|
||||
Video timings
|
||||
-------------
|
||||
### Video timings
|
||||
|
||||
The Open BIOS will not implement any DRM, so it's possible that you might boot
|
||||
out of region games. In an emulator, this is no problem, but it can prove
|
||||
|
|
@ -197,8 +194,7 @@ By fixing the timings in this way, your region-free console will also have
|
|||
correct timings, thus maximum game compatibility, and colours will always be
|
||||
correct no matter what video cable you're using.
|
||||
|
||||
Modchips
|
||||
--------
|
||||
### Modchips
|
||||
|
||||
If using hardware, you will probably still want a modchip. Many proprietary
|
||||
modchip firmwares exist, such as Old crow, MultiMode3 and Mayumi; these run on
|
||||
|
|
@ -226,8 +222,7 @@ not yet been confirmed by the Canoeboot project.
|
|||
More hardware testing is planned, but the Open BIOS works perfectly in emulators.
|
||||
Give it a try!
|
||||
|
||||
Boot games on SD cards
|
||||
-----------------------
|
||||
### Boot games on SD cards
|
||||
|
||||
The [PicoStation](https://github.com/paulocode/picostation) project provides
|
||||
free firmware for RP2040 devices, which you can solder into a modboard which
|
||||
|
|
@ -238,8 +233,7 @@ real playstation (the picostation replaces your CD drive).
|
|||
Not only is this useful in a development context, but it can also be used when
|
||||
your CD drive has worn out and no longer reads discs properly.
|
||||
|
||||
Final remarks
|
||||
-------------
|
||||
### Final remarks
|
||||
|
||||
Combined with PsNee and PicoStation, the Open BIOS from PCSX-Redux team will
|
||||
turn your 90s PlayStation into a very hackable machine. There is
|
||||
|
|
@ -251,7 +245,7 @@ simply computers, fully reprogrammable and as such, Canoeboot is happy to provid
|
|||
this support, for the Sony PlayStation
|
||||
|
||||
Credit
|
||||
======
|
||||
------
|
||||
|
||||
Thanks go to the PCSX-Redux team for their excellent work reverse engineering
|
||||
the Sony PS1 BIOS.
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: Flashing the ThinkPad R400
|
||||
title: Install Canoeboot on Lenovo ThinkPad R400
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
|
|
@ -21,7 +21,7 @@ x-toc-enable: true
|
|||
GeForce 9300M on some models) |
|
||||
| **Display** | 1280x800/1440x900 TFT |
|
||||
| **Memory** | Up to 8GB |
|
||||
| **Architecture** | x86_64 |
|
||||
| **Architecture** | x86\_64 |
|
||||
| **EC** | Proprietary |
|
||||
| **Original boot firmware** | LenovoBIOS |
|
||||
| **Intel ME/AMD PSP** | Present. Can be completly disabled. |
|
||||
|
|
@ -52,16 +52,12 @@ P*: Partially works with vendor firmware
|
|||
| **SeaBIOS with GRUB** | Works |
|
||||
</div>
|
||||
|
||||
Dell Latitude E6400
|
||||
===================
|
||||
Open source BIOS/UEFI firmware
|
||||
-------------------------
|
||||
|
||||
**If you haven't bought an R400 yet: the [Dell Latitude
|
||||
E6400](../install/latitude.md) is much easier to flash; no disassembly required,
|
||||
it can be flashed entirely in software from Dell BIOS to Canoeboot. It is the
|
||||
same hardware generation (GM45), with same CPUs, video processor, etc.**
|
||||
|
||||
Introduction
|
||||
============
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Lenovo ThinkPad R400 laptop motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
It is believed that all or most R400 laptops are compatible. See notes
|
||||
about [CPU
|
||||
|
|
@ -85,8 +81,16 @@ now, as of 27 January 2024, which is a fork of flashrom.
|
|||
The reason why was explained, in
|
||||
the [Libreboot 20240225 release](https://libreboot.org/news/libreboot20240225.html)**
|
||||
|
||||
Dell Latitude E6400
|
||||
-------------------
|
||||
|
||||
**If you haven't bought an R400 yet: the [Dell Latitude
|
||||
E6400](../install/latitude.md) is much easier to flash; no disassembly required,
|
||||
it can be flashed entirely in software from Dell BIOS to Canoeboot. It is the
|
||||
same hardware generation (GM45), with same CPUs, video processor, etc.**
|
||||
|
||||
EC update {#ecupdate}
|
||||
=========
|
||||
--------------------
|
||||
|
||||
It is recommended that you update to the latest EC firmware version. The
|
||||
[EC firmware](../../faq.md#ec-embedded-controller-firmware) is separate from
|
||||
|
|
@ -111,7 +115,7 @@ TODO: put hardware register logs here like on the [X200](x200.md) and
|
|||
[T400](t400.md) page.
|
||||
|
||||
Installation notes
|
||||
==================
|
||||
------------------
|
||||
|
||||
[External flashing](spi.md) required, if Lenovo BIOS is running.
|
||||
|
||||
|
|
@ -131,15 +135,14 @@ ROM properly first. Although ROM images are provided pre-built in
|
|||
Canoeboot, there are some modifications that you need to make to the one
|
||||
you chose before flashing. (instructions referenced later in this guide)
|
||||
|
||||
Serial port {#serial_port}
|
||||
-----------
|
||||
### Serial port {#serial_port}
|
||||
|
||||
EHCI debug might not be needed. It has been reported that the docking
|
||||
station for this laptop has a serial port, so it might be possible to
|
||||
use that instead.
|
||||
|
||||
A note about CPUs
|
||||
=================
|
||||
-----------------
|
||||
|
||||
[ThinkWiki](http://www.thinkwiki.org/wiki/Category:R400) has a list of
|
||||
CPUs for this system. The Core 2 Duo P8400 and P8600 are believed to
|
||||
|
|
@ -147,13 +150,12 @@ work in Canoeboot. The Core 2 Duo T9600 was confirmed to work, so the
|
|||
T9400 probably also works. *The Core 2 Duo T5870/5670 and Celeron M
|
||||
575/585 are untested!*
|
||||
|
||||
Quad-core CPUs
|
||||
--------------
|
||||
### Quad-core CPUs
|
||||
|
||||
Incompatible. Do not use.
|
||||
|
||||
A note about GPUs
|
||||
=================
|
||||
-----------------
|
||||
|
||||
Some models have an Intel GPU, while others have both an ATI and an
|
||||
Intel GPU; this is referred to as "Dual Graphics" (previously
|
||||
|
|
@ -167,12 +169,12 @@ Intel GPU is used and the ATI GPU is disabled, so native graphics
|
|||
initialization works all the same.
|
||||
|
||||
CPU paste required
|
||||
==================
|
||||
------------------
|
||||
|
||||
See [\#paste](#paste).
|
||||
|
||||
Flash chip size {#flashchips}
|
||||
===============
|
||||
-----------------------------
|
||||
|
||||
Use this to find out:
|
||||
|
||||
|
|
@ -182,17 +184,16 @@ NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog
|
|||
now, as of 3 May 2024, which is a fork of flashrom.
|
||||
|
||||
MAC address {#macaddress}
|
||||
===========
|
||||
-------------------------
|
||||
|
||||
Refer to [mac\_address.md](../install/mac_address.md).
|
||||
|
||||
External flashing
|
||||
=================
|
||||
-----------------
|
||||
|
||||
Refer to [spi.md](spi.md) as a guide for external re-flashing.
|
||||
|
||||
Disassembly
|
||||
-----------
|
||||
### Disassembly
|
||||
|
||||
Remove all screws:\
|
||||
\
|
||||
|
|
@ -278,7 +279,7 @@ Read [this article](spi.md) to learn how you may flash the chip, which is near
|
|||
to the RAM.
|
||||
|
||||
Thermal paste (IMPORTANT)
|
||||
=========================
|
||||
-------------------------
|
||||
|
||||
Because part of this procedure involved removing the heatsink, you will
|
||||
need to apply new paste. Arctic MX-4 is ok. You will also need isopropyl
|
||||
|
|
@ -295,7 +296,7 @@ show how to properly apply the thermal paste. Other guides online detail
|
|||
the proper application procedure.
|
||||
|
||||
Memory
|
||||
======
|
||||
------
|
||||
|
||||
In DDR3 machines with Cantiga (GM45/GS45/PM45), northbridge requires sticks
|
||||
that will work as PC3-8500 (faster PC3/PC3L sticks can work as PC3-8500).
|
||||
|
|
|
|||
|
|
@ -3,8 +3,51 @@ title: Read/write 25XX NOR flash via SPI protocol
|
|||
x-toc-enable: true
|
||||
...
|
||||
|
||||
NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog)
|
||||
now, as of 3 May 2024, which is a fork of flashrom.
|
||||
Need help?
|
||||
----------
|
||||
|
||||
Help is available on [Canoeboot IRC](../../contact.md) and other channels.
|
||||
|
||||
Install open source BIOS/UEFI firmware
|
||||
--------------------------------------
|
||||
|
||||
This guide is predominantly about *installing Canoeboot* (flashing it) onto
|
||||
your motherboard's main system flash. You can also adapt this guide for dumping,
|
||||
erasing and verifying firmware images; this guide shows you how to use
|
||||
the [flashprog](https://flashprog.org/) software with various external
|
||||
25XX NOR flash programmers. This guide is written for *Linux* users, but BSD
|
||||
operating systems are also compatible with flashprog; Windows might be feasible,
|
||||
ditto Apple's MacOS, as flashprog can also run on those, but they are not
|
||||
officially supported by Canoeboot, and *we recommend* that you use Linux/BSD.
|
||||
|
||||
Although this documentation is written *for the Canoeboot project*, it can be
|
||||
used on any compatible 25xx NOR flash, on any number of devices, such as home
|
||||
routers and even certain videogame systems. If you're a refurbisher, and not
|
||||
a Canoeboot-based one, but just a regular refurbisher e.g. on eBay, dealing
|
||||
with proprietary UEFI firmware (and perhaps Windows installations), it may be
|
||||
that on some of them, SMM-based flash writes are performed to store UEFI firmware
|
||||
configurations (instead of the old NVRAM/CMOS memory); you could adapt this
|
||||
guide (and read flashprog documentation) to erase/flash custom configurations,
|
||||
for example when unlocking boot passwords on the computers that you sell. This
|
||||
is the power of [Free Software](https://writefreesoftware.org/learn); flashprog
|
||||
is a Free Software project. The use-case scenario of the humble eBay seller is
|
||||
real; several of them have in fact used this guide in the past.
|
||||
|
||||
So keep that in mind; this is part of the Canoeboot installation instructions,
|
||||
but it can be used for *any* flashing operation on *any* 25xx NOR flash, with
|
||||
all sorts of firmware; you could also use this to *reverse* a Canoeboot
|
||||
installation, re-flashing the original vendor firmware if you made a dump of it,
|
||||
**and we definitely recommend backing that up prior to Canoeboot installation**.
|
||||
|
||||
**Please ensure that your programmer's voltage matches that of the flash IC,
|
||||
and read this guide carefully to account for proper electrical safety. In
|
||||
general, these programmers operate at 3.3v, so you'll need a logic level
|
||||
adapter and e.g. buck converter, if you're dealing with a 1.8V flash IC.**
|
||||
|
||||
**[PLEASE READ THESE INSTRUCTIONS BEFORE INSTALLING](ivy_has_common.md), OR
|
||||
YOU MAY BRICK YOUR MACHINE!! - Please click the link and follow the instructions
|
||||
there, before flashing. For posterity,
|
||||
[here is the link again](ivy_has_common.md).**
|
||||
|
||||
This guide will teach you how to use various tools for externally reprogramming
|
||||
a 25xx NOR flash via SPI protocol. This is the most common type of flash IC for
|
||||
|
|
@ -42,10 +85,9 @@ from Linux, with flashprog.
|
|||
is called *external* because it's not the *internal* one on your mainboard.
|
||||
|
||||
Raspberry Pi Pico
|
||||
=================
|
||||
-----------------
|
||||
|
||||
RP2040/RP2530 both supported
|
||||
----------------------------
|
||||
### RP2040/RP2530 both supported
|
||||
|
||||
**Pico 2 and other RP2530 dongles also supported, on Canoeboot 20250107
|
||||
or higher. Releases before this only supported the original Pico, and other
|
||||
|
|
@ -63,8 +105,7 @@ Additionally, all the software running on it is free, down to the full
|
|||
versions (Pico W & Pico WH) need vendor firmware to use the Wi-Fi chip,
|
||||
but that is not needed for following this guide.
|
||||
|
||||
Download serprog firmware pre-compiled
|
||||
-------------------------
|
||||
### Download serprog firmware pre-compiled
|
||||
|
||||
Download the pico serprog tarball from Canoeboot releases. For example, the
|
||||
Canoeboot 20250107 one would be
|
||||
|
|
@ -72,8 +113,9 @@ named: `canoeboot-20250107_pico_serprog.tar.xz` - it's available under
|
|||
the `roms/` directory in each release. With these binaries, you can easily
|
||||
get started.
|
||||
|
||||
Build serprog firmware from source
|
||||
----------------------------------
|
||||
### Build serprog firmware from source (OPTIONAL)
|
||||
|
||||
**Pre-compiled binaries are also available, in Canoeboot releases.**
|
||||
|
||||
You can alternatively download the serprog firmware here:\
|
||||
<https://codeberg.org/libreboot/pico-serprog>\
|
||||
|
|
@ -96,8 +138,7 @@ at `bin/serprog_pico/serprog_pico.uf2`
|
|||
and `bin/serprog_pico/serprog_pico_w.uf2` - images with `pico2` in the
|
||||
file name are for the Pico 2, and they can also be used.
|
||||
|
||||
Install the serprog firmware
|
||||
----------------------------
|
||||
### Install the serprog firmware
|
||||
|
||||
First, connect just the Pico to your computer with a micro-USB cable.
|
||||
Mount it like any other USB flash drive. If it isn't detected, you might need
|
||||
|
|
@ -113,8 +154,7 @@ release tarball.
|
|||
**NOTE: Other RP2040/2530 devices will also work. You just have to match
|
||||
the right pins and use the correct firmware file!**
|
||||
|
||||
Logic levels
|
||||
------------
|
||||
### Logic levels
|
||||
|
||||
A Pico has proper 3.3V logic levels, unlike a ch341a. Which means it won't
|
||||
destroy your board by sending 5V to it. If you have a 1.8V flash chip,
|
||||
|
|
@ -122,8 +162,7 @@ you need to add a logic level converter. **Please ensure that you have matched
|
|||
the voltage of your programmer to the voltage of your chip; both the data lines
|
||||
and power lines to the chip must match.**
|
||||
|
||||
Wiring
|
||||
------
|
||||
### Wiring
|
||||
|
||||
Disconnect the Pico and proceed to wire it to your
|
||||
[flash chip](/docs/install/spi.html#identify-which-flash-type-you-have).
|
||||
|
|
@ -159,11 +198,16 @@ not worth it. The 12Mbps USB port is limiting the actual speed here.
|
|||
|
||||
Higher speeds might work nicely, on Pico 2.
|
||||
|
||||
Do not use CH341A!
|
||||
==================
|
||||
Do not buy CH341A!
|
||||
------------------
|
||||
|
||||
This section was heavily expanded, on 19 January 2025, because we see many
|
||||
people online still talking about the CH341a. Therefore, the hatred has been
|
||||
amplified. Please read this section carefully, to know why we advise against
|
||||
use of this particular programmer.
|
||||
|
||||
NOR flashes on Canoeboot systems run on 3.3V DC or 1.8V DC, and this includes
|
||||
data lines. CH341A has 5V logic levels on data lines, which will damage your
|
||||
data lines. CH341A can have 5V logic levels on data lines, which can damage your
|
||||
SPI flash and also the southbridge that it's connected to, plus anything else
|
||||
that it's connected to.
|
||||
|
||||
|
|
@ -223,8 +267,80 @@ resistors) performed, on the black CH341A:\
|
|||
The green version (not shown above) may come with 3.3v logic already wired, but
|
||||
still needs to have pull-up resistors placed for WP/HOLD.
|
||||
|
||||
Disclaimer: A few (not many, but wily) people have criticised this section of the
|
||||
documentation, due to a misconception about what it really means and also because
|
||||
this section was previously very poorly written. So to be clear:
|
||||
|
||||
Yes, we are quite well aware that the CH341A can in fact operate at 3.3v,
|
||||
even unmodified black models; the VCC line is 3.3v, and if when you either
|
||||
directly wire VCC to WP/HOLD pins yourself, or a pull-up resistor on the
|
||||
motherboard you're flashing pulls these high at 3.3v, then the logic levels
|
||||
on the data lines do in fact switch to 3V *during an erase, read or write cycle*.
|
||||
When no flashing operation is underway, the data lines are outputting at almost
|
||||
negligable current, so the actual amount of heat generated will be negligable,
|
||||
and therefore damage is unlikely. However, as stated above and as we will state
|
||||
again:
|
||||
|
||||
* This is bad electrical design. The CH341A can switch flexibly between 3V
|
||||
and 5V operation, but most flashes today are 1.8V or 5V anyway, and there are
|
||||
all kinds of scenarios (such as over-current or surge event) where this 5V
|
||||
idle logic level could still be applied. Modifying your CH341a to 3.3v
|
||||
only, as defined in the datasheet (and by this page) is highly recommended.
|
||||
* The drive level is extremely poor anyway, on CH341a, making ISP-based
|
||||
flashing ill advisable in many cases, such as where the PCH (Intel platforms)
|
||||
is partly active and the data lines have lower resistance, because some
|
||||
boards have 0ohms or very low resistance on these lines.
|
||||
* No pull-ups on the WP/hold lines, when flashing in the socket; they are high
|
||||
via 0ohm trace to VCC, whereas you are advised to use a pull-up resistor to
|
||||
mitigate over-current events.
|
||||
* Crap LDO on the board, and no ESD/overcurrent protection; the CH341a probably
|
||||
can't provide much current on the VCC line, especially for ISP-based flashing
|
||||
where the flash shares a common power rail with many other components.
|
||||
|
||||
CH341a is cheap junk. Get yourself a Raspberry Pi Pico instead; it's about the
|
||||
same price, but of much higher quality from an electrical design perspective,
|
||||
supports much higher (12mA!) drive levels on data lines, can control multiple
|
||||
chip selects at once; it's just better, in every way. And the Raspberry Pi is
|
||||
completely reprogrammable, so you can use it for something else when you're
|
||||
done, e.g. UART dongle, or if you're wily enough, [PlayStation 1 Optical Disc
|
||||
Emulator](https://github.com/paulocode/picostation) - the Pico is simply a
|
||||
highly versatile tool, much better value for money than the piece of junk
|
||||
CH341a.
|
||||
|
||||
There is only one instance where the CH341a is *good*, and that is when you're
|
||||
actually flashing a loose (not soldered) chip, in the ZIF socket on the CH341a
|
||||
board. It's a DIP-8 socket, and you can also buy WSON-8 and SOIC-8 or SOIC-16
|
||||
adapters for it; you can also plug a special adapter board into it that converts
|
||||
the voltages (VCC and data lines) to 1.8V, for 1.8V flashes (you could also
|
||||
use that same 1.8V adapter circuit in a breadboard wired to your Pico). On
|
||||
socket-based flashing, *which is specifically what the CH341a was designed
|
||||
for*, you don't have to worry about weak drive level because there is nothing
|
||||
contending with it on the flash IC's data pins.
|
||||
|
||||
The *socket-based* flashing operation is what we recommend this programmer
|
||||
for, *only if you already have one*. We still recommend fixing the issue with
|
||||
the WP/HOLD pins as described above; if you're doing this, note that there are
|
||||
also newer models that have a voltage switch and logic level shifter already
|
||||
on the board, which can be very useful. *Clip-based* flashing (ISP / in-system
|
||||
programming) is, specifically, what we advise against using the CH341a for.
|
||||
|
||||
Even if you *are* doing socket-based flashing, we still suggest buying the Pico
|
||||
instead, though the Pico doesn't come with a ZIF socket; you can wire the Pico
|
||||
to a breadboard instead, if you want to use a socket for flashing. Then you
|
||||
will also have a good ISP device, and the overall cost covering both use-case
|
||||
scenarios is *lower* (cheaper part cost) than buying a CH341a *and* Pico; and
|
||||
the Pico can also emulate the PlayStation Optical Disc Drive in your
|
||||
playstation to boot from SD card instead of your dead CD drive, or could even
|
||||
be a [JTAG adapter](https://hackaday.com/2022/04/11/need-a-jtag-adapter-use-your-pico/) -
|
||||
again, the Pico is a reprogrammable device! Whereas, the CH341a is a fixed-function
|
||||
device (and performs poorly).
|
||||
|
||||
Why pay $10 for a CH341a when you can pay $10 for a Raspberry Pi Pico which is
|
||||
electrically and functionally superior in every way? And the Pico is completely
|
||||
open source, right down to the boot rom.
|
||||
|
||||
Identify which flash type you have
|
||||
==================================
|
||||
----------------------------------
|
||||
|
||||
In all of them, a dot or marking shows pin 1 (in the case of WSON8, pad 1).
|
||||
|
||||
|
|
@ -232,8 +348,7 @@ Use the following photos and then look at your board. When you've figured out
|
|||
what type of chip you have, use that knowledge and the rest of this guide, to
|
||||
accomplish your goal, which is to read from and/or write to the boot flash.
|
||||
|
||||
SOIC8
|
||||
-----
|
||||
### SOIC8
|
||||
|
||||
|
||||
|
||||
|
|
@ -248,8 +363,7 @@ SOIC8
|
|||
| 7 | HOLD |
|
||||
| 8 | VCC |
|
||||
|
||||
SOIC16
|
||||
------
|
||||
### SOIC16
|
||||
|
||||

|
||||
|
||||
|
|
@ -266,8 +380,7 @@ SOIC16
|
|||
|
||||
SOIC8 and SOIC16 are the most common types, but there are others:
|
||||
|
||||
WSON8
|
||||
-----
|
||||
### WSON8
|
||||
|
||||
It will be like this on an X200S or X200 Tablet:\
|
||||
|
||||
|
|
@ -278,15 +391,13 @@ On T400S, it is in this location near the RAM:\
|
|||
\
|
||||
NOTE: in this photo, the chip has been replaced with SOIC8
|
||||
|
||||
DIP8
|
||||
----
|
||||
### DIP8
|
||||
|
||||
|
||||
|
||||
Pinout is the same as SOIC8 above.
|
||||
|
||||
Supply Voltage
|
||||
--------------
|
||||
### Supply Voltage
|
||||
|
||||
Historically, all boards that Canoeboot supports happened to have SPI NOR chips
|
||||
which work at 3.3V DC. With the recent addition of Chromebooks whose chips are
|
||||
|
|
@ -299,18 +410,16 @@ connect it to the chip through an adapter or logic level converter, never
|
|||
directly.
|
||||
|
||||
Software configuration
|
||||
======================
|
||||
----------------------
|
||||
|
||||
General/Le potato
|
||||
-----------------
|
||||
### General/Le potato
|
||||
|
||||
The [generic guide](spi_generic.md) is intended to help those looking to use an
|
||||
SBC which is not listed in this guide.
|
||||
The guide will, however, use the libre computer 'Le Potato' as a reference board.
|
||||
If you have that board, you should refer to the [generic guide.](spi_generic.md)
|
||||
|
||||
BeagleBone Black (BBB)
|
||||
----------------------
|
||||
### BeagleBone Black (BBB)
|
||||
|
||||
SSH into your BeagleBone Black. It is assumed that you are running Debian 9 on
|
||||
your BBB. You will run `flashprog` from your BBB.
|
||||
|
|
@ -372,8 +481,7 @@ Note: flashprog can never write if the flash chip isn't found automatically.
|
|||
This means that it's working (the clip isn't connected to any flash
|
||||
chip, so the error is fine).
|
||||
|
||||
Caution about BBB
|
||||
-----------------
|
||||
### Caution about BBB
|
||||
|
||||
BeagleBone Black is not recommended, because it's very slow and unstable for
|
||||
SPI flashing, and nowadays much better options exist. We used to mainly
|
||||
|
|
@ -382,8 +490,7 @@ Software on it, but nowadays there are superior options.
|
|||
|
||||
TODO: document other SPI flashers
|
||||
|
||||
Rasberry Pi (RPi)
|
||||
-----------------
|
||||
### Rasberry Pi (RPi)
|
||||
|
||||
SSH into your Raspberry Pi. You will run `flashprog` from your Raspberry Pi.
|
||||
|
||||
|
|
@ -402,9 +509,9 @@ Under the Interface section, you can enable SPI.
|
|||
|
||||
The device for communicating via SPI as at `/dev/spidev0.0`
|
||||
|
||||
RPi Drive Strength
|
||||
------------------
|
||||
Flashrom on the RPi may not be able to detect the SPI flash chip on some
|
||||
### RPi Drive Strength
|
||||
|
||||
Flashprog on the RPi may not be able to detect the SPI flash chip on some
|
||||
systems, even if your wiring and clip are set up perfectly. This may be due to
|
||||
the drive strength of the Raspberry Pi GPIOs, which is 8mA by default. Drive
|
||||
strength is essentially the maximum current the pin can output while also
|
||||
|
|
@ -460,8 +567,7 @@ See
|
|||
<https://www.raspberrypi.com/documentation/computers/raspberry-pi.html#gpio-pads-control>
|
||||
for more information about the drive strength control on the Pi.
|
||||
|
||||
Caution about RPi
|
||||
-----------------
|
||||
### Caution about RPi
|
||||
|
||||
Basically, the Raspbian project, now called Raspberry Pi OS, put in their repo
|
||||
an update that added a new "trusted" repository, which just so happened to be
|
||||
|
|
@ -481,8 +587,7 @@ They then removed it, after a public backlash, via the following commits:
|
|||
* <https://github.com/RPi-Distro/raspberrypi-sys-mods/commit/ed96790e6de281bc393b575c38aa8071ce39b555>
|
||||
* <https://github.com/RPi-Distro/raspberrypi-sys-mods/commit/4d1afece91008f3787495b520ac03b53fef754c6>
|
||||
|
||||
Libre firmware on RPi
|
||||
---------------------
|
||||
### Libre firmware on RPi
|
||||
|
||||
The boot firmware on older Raspberry Pi models can be replaced, with entirely
|
||||
libre firmware. This may be a useful additional step, for some users. See:
|
||||
|
|
@ -493,12 +598,11 @@ Website:
|
|||
|
||||
<https://librerpi.github.io/>
|
||||
|
||||
Install flashprog
|
||||
----------------
|
||||
### Install flashprog
|
||||
|
||||
If you're using a BBB or RPi, you will do this while SSH'd into those.
|
||||
|
||||
Flashrom is the software that you will use, for dumping, erasing and rewriting
|
||||
Flashprog is the software that you will use, for dumping, erasing and rewriting
|
||||
the contents of your NOR flash.
|
||||
|
||||
In the Canoeboot build system, from the Git repository, you can download and
|
||||
|
|
@ -544,13 +648,12 @@ Example usage:
|
|||
./elf/flashprog/flashprog -p PROGRAMMER --workaround-mx
|
||||
|
||||
How to use flashprog
|
||||
===================
|
||||
--------------------
|
||||
|
||||
Read past these sections, further down this page, to learn about specific chip
|
||||
types and how to wire them.
|
||||
|
||||
Reading
|
||||
-------
|
||||
### Reading
|
||||
|
||||
Before flashing a new ROM image, it is highly advisable that you dump the
|
||||
current chip contents to a file.
|
||||
|
|
@ -596,8 +699,21 @@ they should all be the same length (VCC and GND wires can be longer).
|
|||
|
||||
This advice is *especially* applicable to the BBB, which is highly unreliable.
|
||||
|
||||
Writing
|
||||
-------
|
||||
For boards with more than one flash chip you will need to read from both chips
|
||||
and combine them into a single file.
|
||||
Most of the time, a two chip setup includes one 8mb 'bottom' chip and one 4mb
|
||||
'top' chip.
|
||||
The setup just described applies to the x230, t430, t530, and t440p.
|
||||
For other boards, make sure you know which chip contains the lower and upper
|
||||
portions of the rom.
|
||||
You can combine both flashes together with `cat` for example:
|
||||
|
||||
cat bottom_8mb.rom top_4mb.rom > full_12mb.rom
|
||||
|
||||
Note that you will need this combined rom if you intend to manually extract vendor
|
||||
files, which is a method not officially supported by Canoeboot's build system.
|
||||
|
||||
### Writing
|
||||
|
||||
Next, run this command (RPi):
|
||||
|
||||
|
|
@ -624,14 +740,22 @@ Verifying flash... VERIFIED.
|
|||
If it says "VERIFIED" or says that the chip contents are identical to the
|
||||
requested image, then the chip is properly flashed.
|
||||
|
||||
If the board you are writing to has two chips you'll need to split the rom into
|
||||
two sections.
|
||||
For example, to split a rom for the 12MB flash setups:
|
||||
|
||||
dd if=canoeboot_12mb.rom bs=1M of=bottom.rom count=8
|
||||
dd if=canoeboot_12mb.rom bs=1M of=top.rom skip=8
|
||||
|
||||
Flash the resulting roms to each of their respective chips according to the above instructions.
|
||||
|
||||
Hardware configuration
|
||||
======================
|
||||
----------------------
|
||||
|
||||
Refer to the above guidance about software configuration. The following advice
|
||||
will teach you how to wire each type of flash chip.
|
||||
|
||||
WARNINGS
|
||||
--------
|
||||
### WARNINGS
|
||||
|
||||
Do not connect the power source until your chip is otherwise properly
|
||||
wired. For instance, do not connect a test clip that has power attached.
|
||||
|
|
@ -656,16 +780,14 @@ DO NOT connect more than 1 DC power source to your flash chip either!
|
|||
Mixing voltages like that can easily cause damage to your equipment, and to
|
||||
your chip/mainboard.
|
||||
|
||||
MISO/MOSI/CS/CLK lines
|
||||
----------------------
|
||||
### MISO/MOSI/CS/CLK lines
|
||||
|
||||
You may want to add 47ohm series resistors on these lines, when flashing the
|
||||
chips. Only do it on those lines (NOT the VCC or GND lines). This provides
|
||||
some protection from over-current. On Intel platforms, the SPI flash is usually
|
||||
connected via such resistors, directly to the Southbridge chipset.
|
||||
|
||||
ISP programming and VCC diode
|
||||
-----------------------------
|
||||
### ISP programming and VCC diode
|
||||
|
||||
ISP means in-system programming. It's when you flash a chip that is already
|
||||
mounted to the mainboard of your computer that you wish to install Canoeboot
|
||||
|
|
@ -705,8 +827,7 @@ the flash into a breadboard when flashing.
|
|||
TODO: Make a page on canoeboot.org, showing how to do this on all mainboards
|
||||
supported by canoeboot.
|
||||
|
||||
GPIO pins on BeagleBone Black (BBB)
|
||||
-----------------------------------
|
||||
### GPIO pins on BeagleBone Black (BBB)
|
||||
|
||||
Use this image for reference when connecting the pomona to the BBB:
|
||||
<https://beagleboard.org/Support/bone101#headers> (D0 = MISO or connects
|
||||
|
|
@ -715,8 +836,7 @@ to MISO).
|
|||
On that page, look at the *P9 header*. It is what you will use to wire up your
|
||||
chip for flashing.
|
||||
|
||||
GPIO pins on Raspberry Pi (RPi) 40 Pin
|
||||
--------------------------------------
|
||||
### GPIO pins on Raspberry Pi (RPi) 40 Pin
|
||||
|
||||
This diagram shows the pinout for most modern Pi's and Pi derivatives.
|
||||
The diagram shows the pins of an RPi on the left and the two SOIC clips
|
||||
|
|
@ -724,8 +844,7 @@ on the left.
|
|||
|
||||
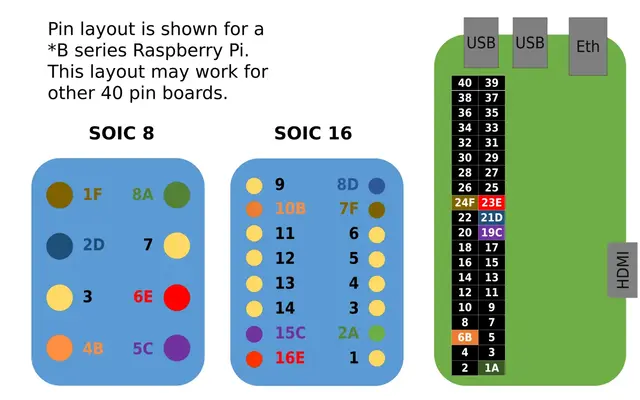
|
||||
|
||||
GPIO pins on Raspberry Pi (RPi) 26 Pin
|
||||
-------------------------------
|
||||
### GPIO pins on Raspberry Pi (RPi) 26 Pin
|
||||
|
||||
Diagram of the 26 GPIO Pins of the Raspberry Pi Model B (for the Model
|
||||
B+ with 40 pins, start counting from the right and leave 14 pins):
|
||||
|
|
@ -734,8 +853,7 @@ B+ with 40 pins, start counting from the right and leave 14 pins):
|
|||
|
||||
Use this as a reference for the other sections in this page, seen below:
|
||||
|
||||
SOIC8/DIP8/WSON8 wiring diagram
|
||||
-------------------------------
|
||||
### SOIC8/DIP8/WSON8 wiring diagram
|
||||
|
||||
Refer to this diagram:
|
||||
|
||||
|
|
@ -762,8 +880,7 @@ will provide a stable 3.3V voltage, with adequate current levels. On those
|
|||
laptops, this is necessary because the flash shares a common 3.3V DC rail with
|
||||
many other ICs that all draw quite a lot of current.
|
||||
|
||||
SOIC16 wiring diagram (Raspberry Pi)
|
||||
------------------------------------
|
||||
### SOIC16 wiring diagram (Raspberry Pi)
|
||||
|
||||
RPi GPIO header:\
|
||||
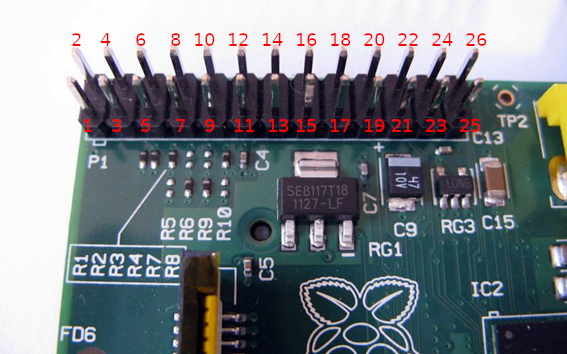
|
||||
|
|
@ -801,8 +918,7 @@ NOTE: pins 1 and 9 are WP/HOLD pins. If flashing a chip on a breadboard, please
|
|||
use pull-up resistors on those (see notes below), and decoupling capacitor on
|
||||
pin 2 (VCC).
|
||||
|
||||
Pull-up resistors and decoupling capacitors
|
||||
-------------------------------------------
|
||||
### Pull-up resistors and decoupling capacitors
|
||||
|
||||
**Do this for chips mounted to a breadboard. Ignore this section if you're
|
||||
flashing a chip that is already soldered to a mainboard.**
|
||||
|
|
@ -850,8 +966,7 @@ WP/HOLD are not pin 3/7 like above, but instead pins 1 and 9, so wire your
|
|||
pull-up resistors on those. VCC on SOIC16 is pin 2, so wire your decoupling
|
||||
capacitors up on that.
|
||||
|
||||
SOIC8/WSON8/DIP8/SOIC16 not mounted to a mainboard
|
||||
--------------------------------------------------
|
||||
### SOIC8/WSON8/DIP8/SOIC16 not mounted to a mainboard
|
||||
|
||||
If your system has lower capacity SPI flash, you can upgrade. On *most* systems,
|
||||
SPI flash is memory mapped and the maximum (in practise) that you can use is a
|
||||
|
|
@ -923,8 +1038,7 @@ and good 60/40 or 63/37 leaded solder (don't use lead-free):
|
|||
|
||||
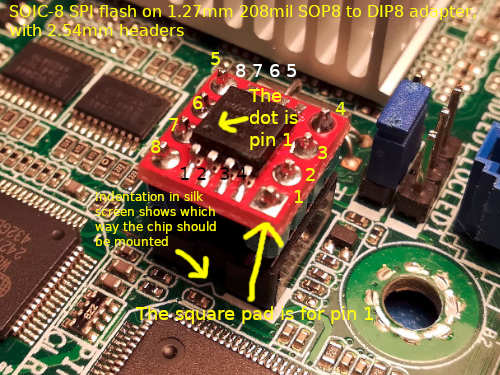
|
||||
|
||||
SOIC8/SOIC16 soldered to a mainboard
|
||||
------------------------------------
|
||||
### SOIC8/SOIC16 soldered to a mainboard
|
||||
|
||||
This is an example of *in-system programming* or *ISP* for short.
|
||||
|
||||
|
|
@ -949,8 +1063,7 @@ Here is an example of a test clip connected for SOIC16:\
|
|||
And here is an example photo for SOIC8:\
|
||||
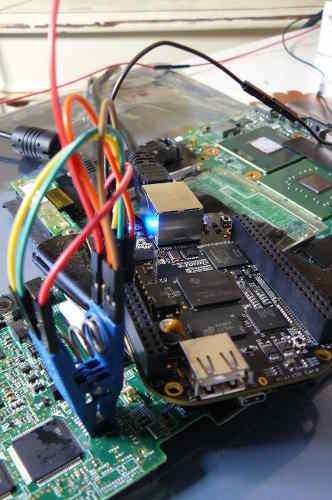
|
||||
|
||||
DIP8 soldered to the mainboard
|
||||
------------------------------
|
||||
### DIP8 soldered to the mainboard
|
||||
|
||||
It is extremely cursed for DIP8 to be soldered directly to the mainboard. It is
|
||||
usually mounted to a socket.
|
||||
|
|
@ -965,8 +1078,7 @@ directly soldered. It is almost always mounted in a socket.
|
|||
|
||||
Your DIP8 IC has the same pinout as a SOIC8 IC.
|
||||
|
||||
Replace WSON8 IC with SOIC8
|
||||
---------------------------
|
||||
### Replace WSON8 IC with SOIC8
|
||||
|
||||
**NOTE: You can alternatively purchase WSON8 probes from a site like Aliexpress.
|
||||
They look similar to SOIC8 clips, and they work similarly.**
|
||||
|
|
@ -1081,7 +1193,7 @@ evaporates quickly and it does not leave a corrosive residue.
|
|||
-------------------------------------------------------------------------------
|
||||
|
||||
LICENSING
|
||||
=========
|
||||
---------
|
||||
|
||||
This page is released under different copyright terms than most other pages
|
||||
on this website.
|
||||
|
|
|
|||
|
|
@ -23,10 +23,9 @@ canoeboot 目前记录了这些 SPI 编程器的使用方法:
|
|||
你在读的*这个*教程,使用的是*外部*编程器。之所以叫*外部*,是因为用的不是主板上的*内部*编程器。
|
||||
|
||||
Raspberry Pi Pico
|
||||
=================
|
||||
-----------------
|
||||
|
||||
RP2040/RP2530 both supported
|
||||
----------------------------
|
||||
### RP2040/RP2530 both supported
|
||||
|
||||
**Pico 2 and other RP2530 dongles also supported, on Canoeboot 20250107
|
||||
or higher. Releases before this only supported the original Pico, and other
|
||||
|
|
@ -44,8 +43,7 @@ Additionally, all the software running on it is free, down to the full
|
|||
versions (Pico W & Pico WH) need vendor firmware to use the Wi-Fi chip,
|
||||
but that is not needed for following this guide.
|
||||
|
||||
Download serprog firmware pre-compiled
|
||||
-------------------------
|
||||
### Download serprog firmware pre-compiled
|
||||
|
||||
Download the pico serprog tarball from Canoeboot releases. For example, the
|
||||
Canoeboot 20250107 one would be
|
||||
|
|
@ -53,8 +51,7 @@ named: `canoeboot-20250107_pico_serprog.tar.xz` - it's available under
|
|||
the `roms/` directory in each release. With these binaries, you can easily
|
||||
get started.
|
||||
|
||||
Build serprog firmware from source
|
||||
----------------------------------
|
||||
### Build serprog firmware from source
|
||||
|
||||
You can alternatively download the serprog firmware here:\
|
||||
<https://codeberg.org/libreboot/pico-serprog>\
|
||||
|
|
@ -77,8 +74,7 @@ at `bin/serprog_pico/serprog_pico.uf2`
|
|||
and `bin/serprog_pico/serprog_pico_w.uf2` - images with `pico2` in the
|
||||
file name are for the Pico 2, and they can also be used.
|
||||
|
||||
Install the serprog firmware
|
||||
----------------------------
|
||||
### Install the serprog firmware
|
||||
|
||||
First, connect just the Pico to your computer with a micro-USB cable.
|
||||
Mount it like any other USB flash drive. If it isn't detected, you might need
|
||||
|
|
@ -94,8 +90,7 @@ release tarball.
|
|||
**NOTE: Other RP2040/2530 devices will also work. You just have to match
|
||||
the right pins and use the correct firmware file!**
|
||||
|
||||
Logic levels
|
||||
------------
|
||||
### Logic levels
|
||||
|
||||
A Pico has proper 3.3V logic levels, unlike a ch341a. Which means it won't
|
||||
destroy your board by sending 5V to it. If you have a 1.8V flash chip,
|
||||
|
|
@ -103,8 +98,7 @@ you need to add a logic level converter. **Please ensure that you have matched
|
|||
the voltage of your programmer to the voltage of your chip; both the data lines
|
||||
and power lines to the chip must match.**
|
||||
|
||||
Wiring
|
||||
------
|
||||
### Wiring
|
||||
|
||||
Disconnect the Pico and proceed to wire it to your
|
||||
[flash chip](/docs/install/spi.html#identify-which-flash-type-you-have).
|
||||
|
|
@ -141,7 +135,7 @@ not worth it. The 12Mbps USB port is limiting the actual speed here.
|
|||
Higher speeds might work nicely, on Pico 2.
|
||||
|
||||
不要使用 CH341A!
|
||||
==================
|
||||
----------------
|
||||
|
||||
canoeboot 支持的机器,NOR flash 使用的是 3.3V DC 或 1.8V DC,这也包括了数据线路。CH341A 在数据线路上有 5V 逻辑电平,这会损伤 SPI flash 和它连接的南桥,以及它连接的其它任何东西。
|
||||
|
||||
|
|
@ -172,26 +166,23 @@ canoeboot 支持的机器,NOR flash 使用的是 3.3V DC 或 1.8V DC,这也
|
|||
绿色版本(上面未展示)可能已经连接了 3.3v 逻辑电平,但仍然需要为 WP/HOLD 增加上拉电阻。
|
||||
|
||||
识别你的 flash 类型
|
||||
==================================
|
||||
-------------------
|
||||
|
||||
每一个 flash,都会有一个点或者标记,表明这是第 1 引脚(如 WSON8 的第 1 焊盘)。
|
||||
|
||||
参考下面的图片,再看看你的主板。搞清楚你的芯片类型之后,根据你了解的情况及本教程剩下的部分,来实现你的目标,即对你的引导 flash 进行读/写。
|
||||
|
||||
SOIC8
|
||||
-----
|
||||
### SOIC8
|
||||
|
||||

|
||||
|
||||
SOIC16
|
||||
------
|
||||
### SOIC16
|
||||
|
||||

|
||||
|
||||
SOIC8 和 SOIC16 是最常见的类型,但也有其他的类型:
|
||||
|
||||
WSON8
|
||||
-----
|
||||
### WSON8
|
||||
|
||||
X200S 或 X200 Tablet 上是像这样的:\
|
||||

|
||||
|
|
@ -200,28 +191,24 @@ T400S 上,是在 RAM 附近的这个位置:\
|
|||
\
|
||||
注意: 本照片中的芯片换成了 SOIC8
|
||||
|
||||
DIP8
|
||||
----
|
||||
### DIP8
|
||||
|
||||

|
||||
|
||||
电源电压
|
||||
--------------
|
||||
### 电源电压
|
||||
|
||||
之前,Canoeboot 支持的所有主板,刚好都有在 3.3V DC 下工作的 SPI NOR 芯片。因为最近添加了额定 1.8V DC 芯片的 Chromebook,所以就不再是这么回事了。
|
||||
|
||||
检查主板上芯片的元件型号,再查找一下它的数据表。找出它需要的电源电压并记下来。如果它和你外部刷写硬件的输出电压不匹配,那你只能通过适配器或者逻辑电平转换器,把它连至芯片,而绝不能直接连接。
|
||||
|
||||
软件配置
|
||||
======================
|
||||
--------
|
||||
|
||||
通用/Le potato
|
||||
-----------------
|
||||
### 通用/Le potato
|
||||
|
||||
[通用指南](spi_generic.md)可以帮助你使用本指南未列出的 SBC(单板电脑)。不过,那份指南会使用 libre computer 'Le Potato' 作为参考板。如果你有那块板子,你应该参考 [通用指南](spi_generic.md)。
|
||||
|
||||
BeagleBone Black(BBB)
|
||||
----------------------
|
||||
### BeagleBone Black(BBB)
|
||||
|
||||
SSH 连接到你的 BeagleBone Black。假定你在 BBB 上用的是 Debian 9。你将在 BBB 上运行 `flashprog`。
|
||||
|
||||
|
|
@ -278,15 +265,13 @@ Note: flashprog can never write if the flash chip isn't found automatically.
|
|||
|
||||
这表示正常工作了(夹子没连接任何 flash 芯片,所以出错是正常的)。
|
||||
|
||||
BBB 注意事项
|
||||
-----------------
|
||||
### BBB 注意事项
|
||||
|
||||
不建议使用 BeagleBone Black,因为拿它来进行 SPI 刷写,速度很慢而且不稳定,并且现在有更好的选择了。我们以前建议使用 BBB,因为它可以完全运行自由软件,但现在有了更佳的选择。
|
||||
|
||||
计划:讲解其他 SPI 刷写工具
|
||||
|
||||
Rasberry Pi(RPi)
|
||||
-----------------
|
||||
### Rasberry Pi(RPi)
|
||||
|
||||
SSH 连接到树莓派。你将在树莓派上运行 `flashprog`。
|
||||
|
||||
|
|
@ -303,8 +288,7 @@ SSH 连接到树莓派。你将在树莓派上运行 `flashprog`。
|
|||
|
||||
用于 SPI 通讯的设备位于 `/dev/spidev0.0`。
|
||||
|
||||
RPi 驱动强度(Drive Strength)
|
||||
------------------
|
||||
### RPi 驱动强度(Drive Strength)
|
||||
|
||||
RPi 的 flashprog 可能无法检测到一些系统的 SPI flash,即使你已经完美地连好了线并夹住了芯片。这可能是因为树莓派 GPIO 的驱动强度,它默认是 8mA。驱动强度本质上就是,在保持高电平最低电压的同时,引脚最高能输出的电流。对树莓派而言,这个电压是 3.0 V。
|
||||
|
||||
|
|
@ -334,8 +318,7 @@ RPi 的 flashprog 可能无法检测到一些系统的 SPI flash,即使你已
|
|||
|
||||
见 <https://www.raspberrypi.com/documentation/computers/raspberry-pi.html#gpio-pads-control> 了解树莓派上的驱动强度控制。
|
||||
|
||||
RPi 注意事项
|
||||
-----------------
|
||||
### RPi 注意事项
|
||||
|
||||
基本上,Raspbian 项目,即现在的 Raspberry Pi OS,对其仓库进行了更新,增加了一个新的“受信任”仓库,这刚好是一个微软软件仓库。他们这么做,似乎是为了 VS Code,但问题在于,这可以让微软自由地控制他们喜欢的依赖(根据 apt-get 规则)。每当你更新,你都会对微软的服务器发送请求。不觉得这很奇怪吗?
|
||||
|
||||
|
|
@ -348,8 +331,7 @@ RPi 注意事项
|
|||
* <https://github.com/RPi-Distro/raspberrypi-sys-mods/commit/ed96790e6de281bc393b575c38aa8071ce39b555>
|
||||
* <https://github.com/RPi-Distro/raspberrypi-sys-mods/commit/4d1afece91008f3787495b520ac03b53fef754c6>
|
||||
|
||||
RPi 的自由固件
|
||||
---------------------
|
||||
### RPi 的自由固件
|
||||
|
||||
旧款树莓派的引导固件可以替换成完全自由的固件。对有些用户而言,这额外的一步可能很有用。参见:
|
||||
|
||||
|
|
@ -359,8 +341,7 @@ RPi 的自由固件
|
|||
|
||||
<https://librerpi.github.io/>
|
||||
|
||||
安装 flashprog
|
||||
----------------
|
||||
### 安装 flashprog
|
||||
|
||||
如果你在使用 BBB 或者 RPi,你需要在 SSH 进去之后再这么做。
|
||||
|
||||
|
|
@ -388,12 +369,11 @@ Flashprog 是用来读出、擦除、重写 NOR flash 内容的软件。
|
|||
如果你直接下载了 flashprog 源代码,你可以进入目录并直接运行 `make`。在 canoeboot 构建系统中,`config/dependencies/` 处的脚本写明了构建依赖,你可以直接使用 `apt-get` 软件安装。
|
||||
|
||||
如何使用 flashprog
|
||||
===================
|
||||
------------------
|
||||
|
||||
请先阅读本页更下方的部分,了解特定的芯片类型及其接线方法。
|
||||
|
||||
读出
|
||||
-------
|
||||
### 读出
|
||||
|
||||
刷入新的 ROM 镜像之前,强烈建议你将当前芯片的内容读出到一个文件。
|
||||
|
||||
|
|
@ -433,8 +413,7 @@ BBB 的话,这样:
|
|||
|
||||
注意,如果你要手动提取 blob,那你就需要这个组合而成的 rom。
|
||||
|
||||
写入
|
||||
-------
|
||||
### 写入
|
||||
|
||||
接下来,运行这个命令(RPi):
|
||||
|
||||
|
|
@ -459,12 +438,11 @@ Verifying flash... VERIFIED.
|
|||
如果它显示“VERIFIED”了,或者芯片的内容和请求的镜像一致,那芯片就刷写成功了。
|
||||
|
||||
硬件配置
|
||||
======================
|
||||
--------
|
||||
|
||||
软件配置请参考上面的教程。下面的建议会教你如何为每种 flash 芯片接线。
|
||||
|
||||
警告
|
||||
--------
|
||||
### 警告
|
||||
|
||||
在芯片还没有正确接好线时,先不要连接电源。例如,不要连接到接通电源的测试夹。
|
||||
|
||||
|
|
@ -476,13 +454,11 @@ Verifying flash... VERIFIED.
|
|||
|
||||
也不要给你的 flash 芯片连接超过 1 个 DC 电源!那样混合电压的话,很容易损伤你的设备及芯片/主板。
|
||||
|
||||
MISO/MOSI/CS/CLK 接线
|
||||
----------------------
|
||||
### MISO/MOSI/CS/CLK 接线
|
||||
|
||||
在刷写这些芯片的时候,你可能也想增加 47 欧姆的串联电阻(不是加在 VCC 或 GND 线上)。这可以提供一些过流保护。在 Intel 平台上,SPI flash 直接连接到南桥芯片组时,通常会通过这样的电阻。
|
||||
|
||||
ISP 编程及 VCC 二极管
|
||||
-----------------------------
|
||||
### ISP 编程及 VCC 二极管
|
||||
|
||||
ISP 即系统内编程(in-system programming)。它指的是,一块芯片已经装在了你想安装 canoeboot 的电脑的主板上,而你要对这块芯片进行刷写。
|
||||
|
||||
|
|
@ -498,22 +474,19 @@ ISP 即系统内编程(in-system programming)。它指的是,一块芯片
|
|||
|
||||
计划:在 canoeboot.org 创建一个页面,讲怎么在 canoeboot 支持的所有主板这么做。
|
||||
|
||||
BeagleBone Black(BBB)上的 GPIO 引脚
|
||||
-----------------------------------
|
||||
### BeagleBone Black(BBB)上的 GPIO 引脚
|
||||
|
||||
把 pomona 夹子连接到 BBB 时,参考这张图片:<https://beagleboard.org/Support/bone101#headers> (D0 = MISO 或连接到 MISO)。
|
||||
|
||||
如果你要用 *P9 排针*来连接芯片刷写的话,请看那个页面的那个部分。
|
||||
|
||||
40 引脚树莓派(RPi)的 GPIO 引脚
|
||||
--------------------------------------
|
||||
### 40 引脚树莓派(RPi)的 GPIO 引脚
|
||||
|
||||
下图展示了大多数现代树莓派及其衍生版的引脚分配。图中右边是 RPi 的引脚,左边是两个 SOIC 夹。
|
||||
|
||||

|
||||
|
||||
26 引脚树莓派(RPi)的 GPIO 引脚
|
||||
-------------------------------
|
||||
### 26 引脚树莓派(RPi)的 GPIO 引脚
|
||||
|
||||
树莓派 B 款 26 GPIO 引脚图(对 40 引脚的 B+ 款而言,从右边开始数,剩下 14 个引脚):
|
||||
|
||||
|
|
@ -521,8 +494,7 @@ BeagleBone Black(BBB)上的 GPIO 引脚
|
|||
|
||||
此处的信息,也请在阅读以下其他部分时参考:
|
||||
|
||||
SOIC8/DIP8/WSON8 接线图
|
||||
-------------------------------
|
||||
### SOIC8/DIP8/WSON8 接线图
|
||||
|
||||
参考此表:
|
||||
|
||||
|
|
@ -543,8 +515,7 @@ SOIC8/DIP8/WSON8 接线图
|
|||
|
||||
注意:在 X60/T60 thinkpad 上,不要连接第 8 引脚。而是将你的 PSU 接在主板供电口上,但不要启动主板。这会提供稳定的 3.3V 电压及足够的电流。在这些笔记本上,这是必要的,因为 flash 和其他许多 IC 共用一路 3.3V DC 电源,这些 IC 都会分走很多电流。
|
||||
|
||||
SOIC16 接线图(树莓派)
|
||||
------------------------------------
|
||||
### SOIC16 接线图(树莓派)
|
||||
|
||||
RPi GPIO 排针:\
|
||||
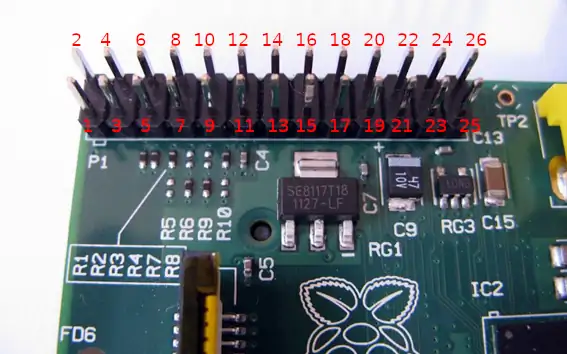
|
||||
|
|
@ -580,8 +551,7 @@ BBB P9 排针:\
|
|||
|
||||
注意:第 1 和第 9 引脚是 WP/HOLD 引脚。在面包板上刷写芯片时,请对它们使用上拉电阻(见上面的注记),并在第 2 引脚(VCC)使用去耦电容。
|
||||
|
||||
上拉电阻和去耦电容
|
||||
-------------------------------------------
|
||||
### 上拉电阻和去耦电容
|
||||
|
||||
**如果芯片是装在面包板上的,那请遵循这里的步骤。如果你要刷写的芯片已经焊接在了主板上,那请忽略这一部分。**
|
||||
|
||||
|
|
@ -602,8 +572,7 @@ SOIC8/WSON8/DIP8:如果芯片在主板上,那第 8 引脚,即 VCC,就已
|
|||
|
||||
SOIC16:同上,但在面包板上使用 SOIC16 socket。在 SOIC16 上,WP/HOLD 不同于上面的第 3/7 引脚,而是第 1 和第 9 引脚,所以要把上拉电阻接到那里。SOIC16 上的 VCC 是第 2 引脚,所以要把去耦电容接到那里。
|
||||
|
||||
SOIC8/WSON8/DIP8/SOIC16 未安装在主板上
|
||||
--------------------------------------------------
|
||||
### SOIC8/WSON8/DIP8/SOIC16 未安装在主板上
|
||||
|
||||
如果你的机器的 SPI flash 容量较低,那你可以升级。在*大多数*机器上,SPI flash 是经过映射的内存,而(实际上)你最大可以使用 16MiB 的芯片。例如,canoeboot 的 KGPE-D16 和 KCMA-D8 主板默认有 2MiB flash,但你可以对它们轻松升级。另一个例子是 ThinkPad X200S、X200 Tablet 和 T400S,它们都有 WSON8,而最佳的方案就是将它替换为 SOIC8 flash 芯片。
|
||||
|
||||
|
|
@ -640,8 +609,7 @@ SOIC8/WSON8/DIP8/SOIC16 未安装在主板上
|
|||

|
||||

|
||||
|
||||
SOIC8/SOIC16 焊接在主板上
|
||||
------------------------------------
|
||||
### SOIC8/SOIC16 焊接在主板上
|
||||
|
||||
这是*系统内编程*或 *ISP* 的一个简短例子。
|
||||
|
||||
|
|
@ -657,8 +625,7 @@ Pomona 5252 是一个 SOIC16 测试夹。也有其他的可以用,但这个是
|
|||
SOIC8 例子的照片如下:\
|
||||

|
||||
|
||||
DIP8 焊接在主板上
|
||||
------------------------------
|
||||
### DIP8 焊接在主板上
|
||||
|
||||
把 DIP8 直接焊接在主板上怪异至极。它通常是安装在芯片座上的。
|
||||
|
||||
|
|
@ -668,8 +635,7 @@ DIP8 焊接在主板上
|
|||
|
||||
DIP8 IC 的引脚分配和 SOIC8 IC 一样。
|
||||
|
||||
使用 SOIC8 替换 WSON8 IC
|
||||
---------------------------
|
||||
### 使用 SOIC8 替换 WSON8 IC
|
||||
|
||||
**NOTE: You can alternatively purchase WSON8 probes from a site like Aliexpress.
|
||||
They look similar to SOIC8 clips, and they work similarly.**
|
||||
|
|
@ -735,7 +701,7 @@ WSON8 IC:\
|
|||
-------------------------------------------------------------------------------
|
||||
|
||||
许可证
|
||||
=========
|
||||
------
|
||||
|
||||
本页面发布所使用的版权条款,不同于本网站上大多数其他页面。
|
||||
|
||||
|
|
|
|||
|
|
@ -6,7 +6,10 @@ x-toc-enable: true
|
|||
NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog)
|
||||
now, as of 3 May 2024, which is a fork of flashrom.
|
||||
|
||||
There are a plethora of single board computers with which you can flash canoeboot to a SOIC chip.
|
||||
Background information
|
||||
----------------------
|
||||
|
||||
There are a plethora of single board computers with which you can flash Canoeboot to a SOIC chip.
|
||||
Some users might be daunted by the price of a raspberry pi.
|
||||
This guide is intended to help users looking to use a programmer which is not listed in the [main guide.](spi.md)
|
||||
As an example, this guide will use the [libre computer 'le potato.'](https://libre.computer/products/aml-s905x-cc/)
|
||||
|
|
@ -22,7 +25,7 @@ All of this means that you should try to find a board that is *known* to support
|
|||
It is *not* enough to know that the board itself supports SPI.
|
||||
|
||||
Selecting an Operating System
|
||||
=============================
|
||||
-----------------------------
|
||||
|
||||
In theory, any linux based operating system will do.
|
||||
In practice, many distros are highly limited when it comes to single-board-computers.
|
||||
|
|
@ -36,7 +39,7 @@ If your SBC supports [Raspbian](https://www.raspberrypi.com/software/) then usin
|
|||
As a bonus, you may refer to the [main guide](spi.md) if the SBC you have supports raspbian, should you get confused with this guide.
|
||||
|
||||
Connecting to your Programmer
|
||||
=============================
|
||||
-----------------------------
|
||||
|
||||
Many SBC operating systems enable ssh by default.
|
||||
If the OS you chose does not enable ssh on first boot, try checking the distro documentation and looking for terms such as 'headless install.'
|
||||
|
|
@ -54,10 +57,10 @@ SSH to your programmer using the default credentials as specified in your distro
|
|||
The IP address is the one determined in the earlier step.
|
||||
For example:
|
||||
|
||||
`ssh root@192.168.0.167`
|
||||
ssh root@192.168.0.167
|
||||
|
||||
Finding GPIO Pins
|
||||
=================
|
||||
-----------------
|
||||
|
||||
If you have determined that a board supports SPI then the only step left is to
|
||||
determine the correct location of the SPI pins.
|
||||
|
|
@ -69,7 +72,7 @@ Match each of the categories in the 'signal' column with those in the 'pin' colu
|
|||
Using this method, you can theoretically use any single board computer with SPI support.
|
||||
|
||||
Enabling SPI
|
||||
============
|
||||
------------
|
||||
|
||||
The modules needed and methods to enable SPI vary based on the SBC you choose.
|
||||
You should always make sure there is a well documented method for enabling SPI on your SBC before purchasing.
|
||||
|
|
@ -80,8 +83,8 @@ sudo ldto enable spicc spicc-spidev
|
|||
sudo ldto merge spicc spicc-spidev
|
||||
```
|
||||
|
||||
Using Flashprog
|
||||
==============
|
||||
Using flashprog
|
||||
--------------
|
||||
|
||||
Some Linux distros will provide flashprog in their default repositories.
|
||||
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: Flashing the ThinkPad T400 externally
|
||||
title: Install Canoeboot on Lenovo ThinkPad T400
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
|
|
@ -20,7 +20,7 @@ x-toc-enable: true
|
|||
3650 on some models) |
|
||||
| **Display** | 1280x800/1440x900 TFT |
|
||||
| **Memory** | 2 or 4GB (Upgradable to 8GB) |
|
||||
| **Architecture** | x86_64 |
|
||||
| **Architecture** | x86\_64 |
|
||||
| **EC** | Proprietary |
|
||||
| **Original boot firmware** | LenovoBIOS |
|
||||
| **Intel ME/AMD PSP** | Present. Can be completly disabled. |
|
||||
|
|
@ -51,16 +51,12 @@ P*: Partially works with vendor firmware
|
|||
| **SeaBIOS with GRUB** | Works |
|
||||
</div>
|
||||
|
||||
Dell Latitude E6400
|
||||
===================
|
||||
Open source BIOS/UEFI firmware
|
||||
-------------------------
|
||||
|
||||
**If you haven't bought an T400 yet: the [Dell Latitude
|
||||
E6400](../install/latitude.md) is much easier to flash; no disassembly required,
|
||||
it can be flashed entirely in software from Dell BIOS to Canoeboot. It is the
|
||||
same hardware generation (GM45), with same CPUs, video processor, etc.**
|
||||
|
||||
Introduction
|
||||
============
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Lenovo ThinkPad T400 laptop motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
It is believed that all or most laptops of the model T400 are compatible. See notes
|
||||
about [CPU
|
||||
|
|
@ -79,12 +75,20 @@ modified descriptor: see [../install/ich9utils.md](../install/ich9utils.md)*
|
|||
Flashing instructions can be found at
|
||||
[../install/\#flashprog](../install/#flashprog)
|
||||
|
||||
Dell Latitude E6400
|
||||
-------------------
|
||||
|
||||
**If you haven't bought an T400 yet: the [Dell Latitude
|
||||
E6400](../install/latitude.md) is much easier to flash; no disassembly required,
|
||||
it can be flashed entirely in software from Dell BIOS to Canoeboot. It is the
|
||||
same hardware generation (GM45), with same CPUs, video processor, etc.**
|
||||
|
||||
EC update {#ecupdate}
|
||||
=========
|
||||
---------------------
|
||||
|
||||
It is recommended that you update to the latest EC firmware version. The
|
||||
[EC firmware](../../faq.md#ec-embedded-controller-firmware) is separate from
|
||||
libreboot, so we don't actually provide that, but if you still have
|
||||
Canoeboot, so we don't actually provide that, but if you still have
|
||||
Lenovo BIOS then you can just run the Lenovo BIOS update utility, which
|
||||
will update both the BIOS and EC version. See:
|
||||
|
||||
|
|
@ -92,7 +96,7 @@ will update both the BIOS and EC version. See:
|
|||
- <http://www.thinkwiki.org/wiki/BIOS_update_without_optical_disk>
|
||||
|
||||
NOTE: this can only be done when you are using Lenovo BIOS. How to
|
||||
update the EC firmware while running libreboot is unknown. libreboot
|
||||
update the EC firmware while running Canoeboot is unknown. Canoeboot
|
||||
only replaces the BIOS firmware, not EC.
|
||||
|
||||
Updated EC firmware has several advantages e.g. bettery battery
|
||||
|
|
@ -102,7 +106,7 @@ The T400 is almost identical to the X200, code-wise. See
|
|||
[x200.md](x200.md).
|
||||
|
||||
Installation notes
|
||||
============
|
||||
------------------
|
||||
|
||||
[External flashing](spi.md) required, if Lenovo BIOS is running.
|
||||
|
||||
|
|
@ -118,15 +122,14 @@ the screws on page 114 (with title "1130 Keyboard bezel") are swapped
|
|||
and if you follow the HMM you will punch a hole through the bezel in the
|
||||
upper right corner.
|
||||
|
||||
Serial port {#serial_port}
|
||||
-----------
|
||||
### Serial port {#serial_port}
|
||||
|
||||
EHCI debug might not be needed. It has been reported that the docking
|
||||
station for this laptop has a serial port, so it might be possible to
|
||||
use that instead.
|
||||
|
||||
A note about CPUs
|
||||
=================
|
||||
-----------------
|
||||
|
||||
[ThinkWiki](http://www.thinkwiki.org/wiki/Category:T400) has a list of
|
||||
CPUs for this system. The Core 2 Duo P8400, P8600 and P8700 are believed
|
||||
|
|
@ -134,8 +137,7 @@ to work with Canoeboot.
|
|||
|
||||
T9600, T9500, T9550 and T9900 are all compatible, as reported by users.
|
||||
|
||||
Quad-core CPUs
|
||||
--------------
|
||||
### Quad-core CPUs
|
||||
|
||||
Very likely to be compatible, but requires hardware modification.
|
||||
Based on info from German forum post about installing Core Quad CPU on T500 found in coreboot mailing list. Currently work in progress and no guide available.
|
||||
|
|
@ -143,9 +145,8 @@ Based on info from German forum post about installing Core Quad CPU on T500 foun
|
|||
- [Coreboot mailing list post](https://mail.coreboot.org/pipermail/coreboot/2016-November/082463.html)
|
||||
- [German forum post about install Core Quad on T500](https://thinkpad-forum.de/threads/199129)
|
||||
|
||||
|
||||
A note about GPUs
|
||||
=================
|
||||
-----------------
|
||||
|
||||
Some models have an Intel GPU, while others have both an ATI and an
|
||||
Intel GPU; this is referred to as "switchable graphics". In the *BIOS
|
||||
|
|
@ -158,29 +159,28 @@ Intel GPU is used and the ATI GPU is disabled, so native graphics
|
|||
initialization works all the same.
|
||||
|
||||
CPU paste required
|
||||
==================
|
||||
------------------
|
||||
|
||||
See [\#paste](#paste).
|
||||
|
||||
Flash chip size {#flashchips}
|
||||
===============
|
||||
---------------------------
|
||||
|
||||
Use this to find out:
|
||||
|
||||
flashprog -p internal
|
||||
|
||||
MAC address {#macaddress}
|
||||
===========
|
||||
------------------------
|
||||
|
||||
Refer to [mac\_address.md](mac_address.md).
|
||||
|
||||
How to flash externally
|
||||
=========================
|
||||
-----------------------
|
||||
|
||||
Refer to [spi.md](spi.md) as a guide for external re-flashing.
|
||||
|
||||
The procedure
|
||||
-------------
|
||||
### The procedure
|
||||
|
||||
Remove *all* screws, placing them in the order that you removed them:\
|
||||
|
||||
|
|
@ -278,7 +278,7 @@ Refer to the external flashing instructions [here](spi.md), and when you're
|
|||
done, re-assemble your laptop.
|
||||
|
||||
Thermal paste (IMPORTANT)
|
||||
=========================
|
||||
-------------------------
|
||||
|
||||
Because part of this procedure involved removing the heatsink, you will
|
||||
need to apply new paste. Arctic MX-4 is ok. You will also need isopropyl
|
||||
|
|
@ -295,7 +295,7 @@ show how to properly apply the thermal paste. Other guides online detail
|
|||
the proper application procedure.
|
||||
|
||||
Memory
|
||||
======
|
||||
------
|
||||
|
||||
In DDR3 machines with Cantiga (GM45/GS45/PM45), northbridge requires sticks
|
||||
that will work as PC3-8500 (faster PC3/PC3L sticks can work as PC3-8500).
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: ThinkPad T500 external flashing
|
||||
title: Install Canoeboot on Lenovo ThinkPad T500 and/or W500
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
|
|
@ -20,7 +20,7 @@ x-toc-enable: true
|
|||
3650 on some models) |
|
||||
| **Display** | 1280x800/1680x1050/1920x1200 TFT |
|
||||
| **Memory** | 2 or 4GB (Upgradable to 8GB) |
|
||||
| **Architecture** | x86_64 |
|
||||
| **Architecture** | x86\_64 |
|
||||
| **EC** | Proprietary |
|
||||
| **Original boot firmware** | LenovoBIOS |
|
||||
| **Intel ME/AMD PSP** | Present. Can be completly disabled. |
|
||||
|
|
@ -51,16 +51,12 @@ P*: Partially works with vendor firmware
|
|||
| **SeaBIOS with GRUB** | Works |
|
||||
</div>
|
||||
|
||||
Dell Latitude E6400
|
||||
===================
|
||||
Open source BIOS/UEFI firmware
|
||||
-------------------------
|
||||
|
||||
**If you haven't bought an T500 yet: the [Dell Latitude
|
||||
E6400](../install/latitude.md) is much easier to flash; no disassembly required,
|
||||
it can be flashed entirely in software from Dell BIOS to Canoeboot. It is the
|
||||
same hardware generation (GM45), with same CPUs, video processor, etc.**
|
||||
|
||||
Introduction
|
||||
============
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Lenovo ThinkPad T500 or ThinkPad W500 laptop motherboard. Canoeboot replaces
|
||||
proprietary BIOS/UEFI firmware.
|
||||
|
||||
It is believed that all or most T500 laptops are compatible. See notes
|
||||
about [CPU
|
||||
|
|
@ -81,8 +77,16 @@ modified descriptor: see [../install/ich9utils.md](../install/ich9utils.md)*
|
|||
Flashing instructions can be found at
|
||||
[../install/\#flashprog](../install/#flashprog)
|
||||
|
||||
Dell Latitude E6400
|
||||
-------------------
|
||||
|
||||
**If you haven't bought an T500 yet: the [Dell Latitude
|
||||
E6400](../install/latitude.md) is much easier to flash; no disassembly required,
|
||||
it can be flashed entirely in software from Dell BIOS to Canoeboot. It is the
|
||||
same hardware generation (GM45), with same CPUs, video processor, etc.**
|
||||
|
||||
EC update {#ecupdate}
|
||||
=========
|
||||
-------------------
|
||||
|
||||
It is recommended that you update to the latest EC firmware version. The
|
||||
[EC firmware](../../faq.md#ec-embedded-controller-firmware) is separate from
|
||||
|
|
@ -104,7 +108,7 @@ The T500 is almost identical to the X200, code-wise. See
|
|||
[x200.md](x200.md).
|
||||
|
||||
Installation notes
|
||||
==================
|
||||
------------------
|
||||
|
||||
[External flashing](spi.md) required, if Lenovo BIOS is running.
|
||||
|
||||
|
|
@ -114,15 +118,14 @@ followed (adapted) if you brick your T500, to know how to recover.
|
|||
|
||||
W500 is also mostly compatible with this guide.
|
||||
|
||||
Serial port {#serial_port}
|
||||
-----------
|
||||
### Serial port {#serial_port}
|
||||
|
||||
EHCI debug might not be needed. It has been reported that the docking
|
||||
station for this laptop has a serial port, so it might be possible to
|
||||
use that instead.
|
||||
|
||||
A note about CPUs
|
||||
=================
|
||||
-----------------
|
||||
|
||||
[ThinkWiki](http://www.thinkwiki.org/wiki/Category:T500) has a list of
|
||||
CPUs for this system. The Core 2 Duo P8400, P8600 and P8700 are believed
|
||||
|
|
@ -132,8 +135,8 @@ confirmed working.
|
|||
T9550 and T9900 was tested by a user, and is compatible as reported in the IRC channel.
|
||||
T9500 and T9400 may also work, but YMMV.
|
||||
|
||||
Quad-core CPUs
|
||||
--------------
|
||||
### Quad-core CPUs
|
||||
|
||||
Very likely to be compatible, but requires hardware modification.
|
||||
Based on info from German forum post about installing Core Quad CPU on T500 found in coreboot mailing list. Currently work in progress and no guide available.
|
||||
|
||||
|
|
@ -149,7 +152,7 @@ everything nicely:
|
|||
<https://yewtu.be/watch?v=Fs4GjDiOie8>
|
||||
|
||||
A note about GPUs
|
||||
=================
|
||||
-----------------
|
||||
|
||||
Some models have an Intel GPU, while others have both an ATI and an
|
||||
Intel GPU; this is referred to as "switchable graphics". In the *BIOS
|
||||
|
|
@ -162,29 +165,28 @@ Intel GPU is used and the ATI GPU is disabled, so native graphics
|
|||
initialization works all the same.
|
||||
|
||||
CPU paste required
|
||||
==================
|
||||
------------------
|
||||
|
||||
See [\#paste](#paste).
|
||||
|
||||
Flash chip size {#flashchips}
|
||||
===============
|
||||
-----------------------------
|
||||
|
||||
Use this to find out:
|
||||
|
||||
flashprog -p internal
|
||||
|
||||
MAC address {#macaddress}
|
||||
===========
|
||||
------------------------
|
||||
|
||||
Refer to [mac\_address.md](mac_address.md).
|
||||
|
||||
Clip wiring
|
||||
===========
|
||||
-----------
|
||||
|
||||
Refer to [spi.md](spi.md) as a guide for external re-flashing.
|
||||
|
||||
The procedure
|
||||
-------------
|
||||
### The procedure
|
||||
|
||||
Remove all screws:\
|
||||
\
|
||||
|
|
@ -287,7 +289,7 @@ Connect your programmer, then connect GND and 3.3V\
|
|||
Now flash Canoeboot.
|
||||
|
||||
Thermal paste (IMPORTANT)
|
||||
=========================
|
||||
-------------------------
|
||||
|
||||
Because part of this procedure involved removing the heatsink, you will
|
||||
need to apply new paste. Arctic MX-4 is ok. You will also need isopropyl
|
||||
|
|
@ -304,7 +306,7 @@ show how to properly apply the thermal paste. Other guides online detail
|
|||
the proper application procedure.
|
||||
|
||||
Wifi
|
||||
====
|
||||
----
|
||||
|
||||
It is recommended that you install a new wifi chipset. This can only be
|
||||
done after installing Canoeboot, because the original firmware has a
|
||||
|
|
@ -316,7 +318,7 @@ the Intel chip that this T500 came with:\
|
|||
 
|
||||
|
||||
WWAN
|
||||
====
|
||||
----
|
||||
|
||||
If you have a WWAN/3G card and/or sim card reader, remove them
|
||||
permanently. The WWAN-3G card has DMA, and proprietary firmware inside;
|
||||
|
|
@ -326,7 +328,7 @@ also track your movements.
|
|||
Not to be confused with wifi (wifi is fine).
|
||||
|
||||
Memory
|
||||
======
|
||||
------
|
||||
|
||||
In DDR3 machines with Cantiga (GM45/GS45/PM45), northbridge requires sticks
|
||||
that will work as PC3-8500 (faster PC3/PC3L sticks can work as PC3-8500).
|
||||
|
|
|
|||
|
|
@ -1,10 +1,15 @@
|
|||
---
|
||||
title: ThinkPad T60 Recovery guide
|
||||
title: Install Canoeboot on Lenovo ThinkPad T60
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog)
|
||||
now, as of 3 May 2024, which is a fork of flashrom.
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Lenovo Thinkpad T60 motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware. *This* version of the guide shows you how to
|
||||
flash using external hardware, which can be useful for un-bricking.
|
||||
|
||||
"Unbricking" means flashing a known-good (working) ROM. The problem:
|
||||
you can't boot the system, making this difficult. In this situation,
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: First-time ThinkPad X200 flashing
|
||||
title: Install Canoeboot on Lenovo ThinkPad X200 / X200s / X200 Tablet
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
|
|
@ -18,7 +18,7 @@ x-toc-enable: true
|
|||
| **Graphics** | Intel GMA X4500MHD |
|
||||
| **Display** | 1280x800/1440x900 TFT |
|
||||
| **Memory** | 1,2,3 or 4GB (Upgradable to 8GB, unofficially) |
|
||||
| **Architecture** | x86_64 |
|
||||
| **Architecture** | x86\_64 |
|
||||
| **EC** | Proprietary |
|
||||
| **Original boot firmware** | LenovoBIOS |
|
||||
| **Intel ME/AMD PSP** | Present. Can be completly disabled. |
|
||||
|
|
@ -47,16 +47,12 @@ P+: Partially works;
|
|||
| **SeaBIOS with GRUB** | Works |
|
||||
</div>
|
||||
|
||||
Dell Latitude E6400
|
||||
===================
|
||||
Open source BIOS/UEFI firmware
|
||||
-------------------------
|
||||
|
||||
**If you haven't bought an X200 yet: the [Dell Latitude
|
||||
E6400](../install/latitude.md) is much easier to flash; no disassembly required,
|
||||
it can be flashed entirely in software from Dell BIOS to Canoeboot. It is the
|
||||
same hardware generation (GM45), with same CPUs, video processor, etc.**
|
||||
|
||||
Introduction
|
||||
============
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Lenovo ThinkPad X200, X200s or X200 Tablet laptop motherboard. Canoeboot
|
||||
replaces proprietary BIOS/UEFI firmware.
|
||||
|
||||
It is believed that all X200 laptops are compatible. X200S and X200
|
||||
Tablet will also work, [depending on the configuration](#x200s).
|
||||
|
|
@ -80,8 +76,16 @@ Flashing instructions can be found at
|
|||
NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog)
|
||||
now, as of 3 May 2024, which is a fork of flashrom.
|
||||
|
||||
Dell Latitude E6400
|
||||
-------------------
|
||||
|
||||
**If you haven't bought an X200 yet: the [Dell Latitude
|
||||
E6400](../install/latitude.md) is much easier to flash; no disassembly required,
|
||||
it can be flashed entirely in software from Dell BIOS to Canoeboot. It is the
|
||||
same hardware generation (GM45), with same CPUs, video processor, etc.**
|
||||
|
||||
EC update {#ecupdate}
|
||||
=========
|
||||
---------------------
|
||||
|
||||
It is recommended that you update to the latest EC firmware version. The
|
||||
[EC firmware](../../faq.md#ec-embedded-controller-firmware) is separate from
|
||||
|
|
@ -102,7 +106,7 @@ Updated EC firmware has several advantages e.g. better battery
|
|||
handling.
|
||||
|
||||
Battery Recall {#batteryrecall}
|
||||
==============
|
||||
------------------------------
|
||||
|
||||
[On 21 April 2015, Lenovo expanded a recall on Lenovo batteries found in some ThinkPad models, which includes the X200 and X200S.](https://pcsupport.lenovo.com/cr/en/solutions/hf004122)
|
||||
To find out if you are affected, use [this Lenovo tool.](https://lenovobattery2014.orderz.com/)
|
||||
|
|
@ -161,14 +165,13 @@ Sources:
|
|||
Mod](http://forum.thinkpads.com/viewtopic.php?p=660662#p660662)
|
||||
- [ThinkWiki.de - X200 Displayumbau](http://thinkwiki.de/X200_Displayumbau)
|
||||
|
||||
### X200S
|
||||
#### X200S
|
||||
|
||||
<http://forum.thinkpads.com/viewtopic.php?p=618928#p618928> explains that the
|
||||
X200S screens/assemblies are thinner. You need to replace the whole lid with
|
||||
one from a normal X200/X201.
|
||||
|
||||
How to tell if it has an LED or CCFL? {#led_howtotell}
|
||||
-------------------------------------
|
||||
### How to tell if it has an LED or CCFL? {#led_howtotell}
|
||||
|
||||
Some X200s have a CCFL backlight and some have an LED backlight, in their LCD
|
||||
panel. This also means that the inverters will vary, so you must be careful if
|
||||
|
|
@ -182,11 +185,11 @@ a lamp which contains mercury; dispose according to local, state or federal
|
|||
laws"* (one with an LED backlit panel will say something different).
|
||||
|
||||
Installation notes
|
||||
==================
|
||||
------------------
|
||||
|
||||
[External flashing](spi.md) required, if running Lenovo BIOS.
|
||||
|
||||
This guide is for those who want libreboot on their ThinkPad X200 while
|
||||
This guide is for those who want Canoeboot on their ThinkPad X200 while
|
||||
they still have the original Lenovo BIOS present. This guide can also be
|
||||
followed (adapted) if you brick your X200, to know how to recover.
|
||||
|
||||
|
|
@ -196,22 +199,19 @@ underneath the palm rest. You will then connect an external SPI programmer, to
|
|||
re-flash the chip externally while it is powered off with the battery removed.
|
||||
|
||||
NOTE: This guide only applies to the regular X200. For X200S and X200 Tablet
|
||||
flashing, please read other guides available on libreboot.org.
|
||||
flashing, please read other guides available on canoeboot.org.
|
||||
|
||||
Flash chip size
|
||||
===============
|
||||
### Flash chip size
|
||||
|
||||
Run this command on x200 to find out flash chip model and its size:
|
||||
|
||||
flashprog -p internal
|
||||
|
||||
MAC address
|
||||
===========
|
||||
### MAC address
|
||||
|
||||
Refer to [mac\_address.md](mac_address.md).
|
||||
|
||||
The procedure
|
||||
-------------
|
||||
### The procedure
|
||||
|
||||
This section is for the X200. This does not apply to the X200S or X200
|
||||
Tablet (for those systems, you have to remove the motherboard
|
||||
|
|
@ -246,7 +246,7 @@ When you're done, put the system back together. If it doesn't boot, try other
|
|||
RAM modules because raminit is very unreliable on this platform (in coreboot).
|
||||
|
||||
Memory
|
||||
======
|
||||
------
|
||||
|
||||
In DDR3 machines with Cantiga (GM45/GS45/PM45), northbridge requires sticks
|
||||
that will work as PC3-8500 (faster PC3/PC3L sticks can work as PC3-8500).
|
||||
|
|
@ -272,8 +272,10 @@ You should see something like this:
|
|||
|
||||
Now [install Linux](../linux/).
|
||||
|
||||
X200S and X200 Tablet users: GPIO33 trick will not work.
|
||||
--------------------------------------------------------
|
||||
Errata
|
||||
------
|
||||
|
||||
### X200S and X200 Tablet users: GPIO33 trick will not work.
|
||||
|
||||
sgsit found out about a pin called GPIO33, which can be grounded to
|
||||
disable the flashing protections by the descriptor and stop the ME from
|
||||
|
|
|
|||
|
|
@ -18,7 +18,7 @@ x-toc-enable: true
|
|||
| **Графіка** | Intel GMA X4500MHD |
|
||||
| **Дісплей** | 1280x800/1440x900 TFT |
|
||||
| **Пам'ять** | 1,2,3 or 4GB (оновлюється до 8GB, неофіційно) |
|
||||
| **Архітектура** | x86_64 |
|
||||
| **Архітектура** | x86\_64 |
|
||||
| **EC** | Пропрієтарний |
|
||||
| **Оригінальна прошивка** | LenovoBIOS |
|
||||
| **Intel ME/AMD PSP** | Наявний. Можна повністю вимкнути. |
|
||||
|
|
@ -48,7 +48,7 @@ P+: Частково працює;
|
|||
</div>
|
||||
|
||||
Вступ
|
||||
============
|
||||
-----
|
||||
|
||||
Вважається що всі ноутбуки X200 сумісні. X200S та X200
|
||||
Tablet також працюватимуть, [залежно від конфігурації](#x200s).
|
||||
|
|
@ -73,7 +73,7 @@ NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog
|
|||
now, as of 3 May 2024, which is a fork of flashrom.
|
||||
|
||||
Оновлення EC {#ecupdate}
|
||||
=========
|
||||
------------------------
|
||||
|
||||
Рекомендується оновити мікропрограму EC до останньої версії.
|
||||
[Прошивка EC](../../faq.md#ec-embedded-controller-firmware) є окремою від
|
||||
|
|
@ -94,7 +94,7 @@ Lenovo BIOS, ви можете просто запустити утиліту о
|
|||
з акумулятором.
|
||||
|
||||
Відкликання батареї {#batteryrecall}
|
||||
==============
|
||||
------------------------------------
|
||||
|
||||
[21 квітня 2015 року, Lenovo розширила відкликання акумуляторів Lenovo, які були встановлені в деяких моделях Thinkpad, зокрема X200 та X200S.](https://pcsupport.lenovo.com/cr/en/solutions/hf004122)
|
||||
Щоб дізнатися, чи вас це стосується, використовуйте [цей інструмент Lenovo.](https://lenovobattery2014.orderz.com/)
|
||||
|
|
@ -103,8 +103,7 @@ Lenovo радить власникам відкликаних моделей "в
|
|||
Після перевірки батареї, Lenovo безкоштовно замінить відкликані батареї.
|
||||
Інструкції щодо заміни батареї для X200/X200s [можна знайти на цій сторінці.](https://pcsupport.lenovo.com/cr/en/parts/pd003507/)
|
||||
|
||||
Список сумісності LCD {#lcd_supported_list}
|
||||
----------------------
|
||||
### Список сумісності LCD {#lcd_supported_list}
|
||||
|
||||
Список РК-панелей (там перераховані панелі X200):
|
||||
<http://www.thinkwiki.org/wiki/TFT_display>
|
||||
|
|
@ -153,14 +152,13 @@ Lenovo радить власникам відкликаних моделей "в
|
|||
Mod](http://forum.thinkpads.com/viewtopic.php?p=660662#p660662)
|
||||
- [ThinkWiki.de - X200 Displayumbau](http://thinkwiki.de/X200_Displayumbau)
|
||||
|
||||
### X200S
|
||||
#### X200S
|
||||
|
||||
<http://forum.thinkpads.com/viewtopic.php?p=618928#p618928> пояснює, що
|
||||
екрани/блоки X200S тонші. Вам потрібно замінити всю кришку на одну від
|
||||
звичайного X200/X201.
|
||||
|
||||
Як визначити, чи у нього LED, чи CCFL? {#led_howtotell}
|
||||
-------------------------------------
|
||||
### Як визначити, чи у нього LED, чи CCFL? {#led_howtotell}
|
||||
|
||||
Деякі X200 мають підсвічування CCFL, а деякі - світлодіодне підсвічування на РК-панелі.
|
||||
Це також означає, що інвертори відрізнятимуться, тому ви повинні бути обережними,
|
||||
|
|
@ -174,7 +172,7 @@ CCFL містять меркурій. На X200 з CCFL підсвіткою (я
|
|||
законів"* (на тому, що має світлодіодне підсвічування, буде написано щось інше).
|
||||
|
||||
Installation notes
|
||||
==================
|
||||
------------------
|
||||
|
||||
[External flashing](spi.md) required, if running Lenovo BIOS.
|
||||
|
||||
|
|
@ -191,19 +189,18 @@ Installation notes
|
|||
будь-ласка прочитайте інші посібники, доступні на libreboot.org.
|
||||
|
||||
Розмір флеш-чіпа
|
||||
===============
|
||||
----------------
|
||||
|
||||
Виконайте цю команду на x200, щоб дізнатися модель флеш-чіпа та його розмір:
|
||||
|
||||
flashprog -p internal
|
||||
|
||||
MAC адреса
|
||||
===========
|
||||
----------
|
||||
|
||||
Зверніться до [mac\_address.md](mac_address.md).
|
||||
|
||||
Процедура
|
||||
-------------
|
||||
### Процедура
|
||||
|
||||
Цей розділ стосується X200. Цей не стосується X200S або X200
|
||||
Tablet (для цих систем потрібно повністю видалити материнську плату,
|
||||
|
|
@ -238,7 +235,7 @@ Tablet (для цих систем потрібно повністю видал
|
|||
модулі оперативної пам'яті, тому що raminit дуже ненадійний на цій платформі (в coreboot).
|
||||
|
||||
Пам'ять
|
||||
======
|
||||
-------
|
||||
|
||||
У машинах DDR3 з Cantiga (GM45/GS45/PM45), північний міст потребує стіків,
|
||||
які працюватимуть як PC3-8500 (швидші стіки PC3/PC3L можуть працювати як PC3-8500).
|
||||
|
|
@ -255,8 +252,7 @@ Tablet (для цих систем потрібно повністю видал
|
|||
|
||||

|
||||
|
||||
Завантажуйтесь!
|
||||
--------
|
||||
### Завантажуйтесь!
|
||||
|
||||
Ви маєте побачити щось подібне цьому:
|
||||
|
||||
|
|
@ -264,8 +260,7 @@ Tablet (для цих систем потрібно повністю видал
|
|||
|
||||
Тепер [встановлюйте Linux](../linux/).
|
||||
|
||||
Користувачі X200S та X200 Tablet: трюк GPIO33 не спрацює.
|
||||
--------------------------------------------------------
|
||||
### Користувачі X200S та X200 Tablet: трюк GPIO33 не спрацює.
|
||||
|
||||
sgsit дізнався про контакт під назвою GPIO33, який можна заземлити,
|
||||
щоб вимкнути захист прошивки за допомогою дескриптора та зупинити ME від
|
||||
|
|
|
|||
|
|
@ -1,8 +1,15 @@
|
|||
---
|
||||
title: ThinkPad X60 Recovery guide
|
||||
title: Install Canoeboot on Lenovo ThinkPad X60
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Lenovo ThinkPad X60 laptop motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
"Unbricking" means flashing a known-good (working) ROM. The problem:
|
||||
you can't boot the system, making this difficult. In this situation,
|
||||
external hardware is needed which can flash the SPI chip (where Canoeboot
|
||||
|
|
|
|||
|
|
@ -1,8 +1,15 @@
|
|||
---
|
||||
title: ThinkPad X60 Tablet Recovery guide
|
||||
title: Install Canoeboot on Lenovo ThinkPad X60 Tablet
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
This document will teach you how to install Canoeboot, on your
|
||||
Lenovo Thinkpad X60 Tablet laptop motherboard. Canoeboot replaces proprietary
|
||||
BIOS/UEFI firmware.
|
||||
|
||||
"Unbricking" means flashing a known-good (working) ROM. The problem:
|
||||
you can't boot the system, making this difficult. In this situation,
|
||||
external hardware is needed which can flash the SPI chip (where Canoeboot
|
||||
|
|
|
|||
|
|
@ -1,9 +1,10 @@
|
|||
---
|
||||
title: Installing Linux
|
||||
title: Boot Linux distro installers on Canoeboot
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
# Introduction
|
||||
GRUB payload assumed
|
||||
--------------------
|
||||
|
||||
This guide assumes that you are using the GRUB bootloader directly.
|
||||
If you're using SeaBIOS, it's quite intuitive and works similarly to other BIOS
|
||||
|
|
@ -17,7 +18,9 @@ Linux distributions, by default).
|
|||
These instructions are intended to be generic, applicable to just about any
|
||||
Linux distribution.
|
||||
|
||||
## Prepare the USB Drive in Linux
|
||||
Prepare the USB Drive in Linux
|
||||
------------------------------
|
||||
|
||||
If you downloaded your ISO while on an existing Linux system, here is how
|
||||
to create the bootable Linux USB drive:
|
||||
|
||||
|
|
@ -40,19 +43,25 @@ folder, this is the command we would run:
|
|||
That's it! You should now be able to boot the installer from your USB drive
|
||||
(the instructions for doing so will be given later).
|
||||
|
||||
## Prepare the USB drive in NetBSD
|
||||
Prepare the USB drive in NetBSD
|
||||
-------------------------------
|
||||
|
||||
[This page](https://wiki.netbsd.org/tutorials/how_to_install_netbsd_from_an_usb_memory_stick/)
|
||||
on the NetBSD website shows how to create a NetBSD bootable USB drive, from
|
||||
within NetBSD itself. You should the `dd` method documented there. This will
|
||||
work with any Linux ISO image.
|
||||
|
||||
## Prepare the USB drive in FreeBSD
|
||||
Prepare the USB drive in FreeBSD
|
||||
--------------------------------
|
||||
|
||||
[This page](https://www.freebsd.org/doc/handbook/bsdinstall-pre.html) on the
|
||||
FreeBSD website shows how to create a bootable USB drive for installing
|
||||
FreeBSD. Use the `dd` method documented. This will work with any Linux ISO
|
||||
image.
|
||||
|
||||
## Prepare the USB drive in LibertyBSD or OpenBSD
|
||||
Prepare the USB drive in OpenBSD
|
||||
--------------------------------
|
||||
|
||||
If you downloaded your ISO on a LibertyBSD or OpenBSD system, here is how to
|
||||
create the bootable Linux USB drive:
|
||||
|
||||
|
|
@ -78,12 +87,14 @@ the OpenBSD installer to it with `dd`. Here's an example:
|
|||
That's it! You should now be able to boot the installer from your USB drive
|
||||
(the instructions for doing so will be given later).
|
||||
|
||||
## GRUB2 config on external media
|
||||
GRUB2 config on external media
|
||||
-------------------------------
|
||||
|
||||
If the distro installer image has a `grub.cfg` file inside, this menuentry is
|
||||
scripted to find it. This works well for many distros.
|
||||
|
||||
## Debian or Devuan net install
|
||||
Debian or Devuan net installation
|
||||
---------------------------------
|
||||
|
||||
Download the Debian or Devuan net installer. You can download the Debian ISO
|
||||
from [the Debian homepage](https://www.debian.org/), or the Devuan ISO from
|
||||
|
|
@ -96,12 +107,16 @@ You can select the option, in the Canoeboot GRUB menu, to load GRUB config
|
|||
from external media, and that should work just fine. Alternatively, pick one
|
||||
of the ISOLINUX-related menu options.
|
||||
|
||||
## Booting ISOLINUX Images (Automatic Method)
|
||||
Booting ISOLINUX Images (Automatic Method)
|
||||
------------------------------------------
|
||||
|
||||
Boot it in GRUB using the `Parse ISOLINUX config (USB)` option. A new menu
|
||||
should appear in GRUB, showing the boot options for that distro; this is a GRUB
|
||||
menu, converted from the usual ISOLINUX menu provided by that distro.
|
||||
|
||||
## Booting ISOLINUX Images (Manual Method)
|
||||
Booting ISOLINUX Images (Manual Method)
|
||||
---------------------------------------
|
||||
|
||||
These are generic instructions. They may or may not be correct for your
|
||||
distribution. You must adapt them appropriately, for whatever Linux
|
||||
distribution it is that you are trying to install.
|
||||
|
|
@ -151,7 +166,11 @@ to see a list of USB devices/partitions. Of course, this will vary from distro
|
|||
to distro. If you did all of that correctly, then it should now be booting your
|
||||
USB drive in the way that you specified.
|
||||
|
||||
## Troubleshooting
|
||||
Troubleshooting
|
||||
---------------
|
||||
|
||||
### Display modes
|
||||
|
||||
Most of these issues occur when using Canoeboot with coreboot's `text-mode`
|
||||
with libgfxinit for video initialization. This mode is useful for text mode
|
||||
payloads, like `MemTest86+`, which expect `text-mode`, but for Linux
|
||||
|
|
@ -161,6 +180,7 @@ do Kernel Mode Setting, so they are able to initialize a frame buffer in bare
|
|||
metal regardless of whatever coreboot is doing).
|
||||
|
||||
### debian-installer Graphical Corruption in Text-Mode (Debian and Devuan)
|
||||
|
||||
When using the ROM images that use Coreboot's `text mode`, instead of the
|
||||
coreboot framebuffer, while using libgfxinit, booting the Debian or Devuan net
|
||||
installer results in graphical corruption, because it is trying to switch to a
|
||||
|
|
|
|||
|
|
@ -3,12 +3,21 @@ title: Modifying grub.cfg in CBFS
|
|||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Configure boot order and so on
|
||||
------------------------------
|
||||
|
||||
Read [Canoeboot flashing guides](../install/) before continuing, and make sure
|
||||
to back up the current flash contents before you consider following this guide.
|
||||
|
||||
Before you follow this guide, it is advisable that you have the ability to
|
||||
[flash externally](../install/spi.md), just in case something goes wrong.
|
||||
|
||||
Canoeboot's *GRUB* payload is much more flexible than most other types of boot
|
||||
payload, but can sometimes require hands-on configuration depending on what you
|
||||
want to do.
|
||||
|
||||
### Why modify the configuration?
|
||||
|
||||
Canoeboot's own GRUB configuration automatically scans for one provided by
|
||||
your distro, and this automation will usually work. Sometimes, you might wish
|
||||
to override it with your own custom menuentry or additional logic in the GRUB
|
||||
|
|
@ -16,11 +25,12 @@ config. You can configure GRUB however you like, and this topic is vast so what
|
|||
to actually *put in the config* will not be covered here.
|
||||
|
||||
This guide will simply teach you how to modify the config, but not what to put,
|
||||
whereas the [GRUB hardening](grub_hardening.md) guide specifically
|
||||
says what to modify; cross reference that page and this page.
|
||||
whereas the [GRUB hardening](../linux/grub_hardening.md) guide specifically
|
||||
says what to modify; cross reference that page and this page, if you want to
|
||||
follow the GRUB hardening guide. Otherwise, this page contains generic guidance.
|
||||
|
||||
**Disable security before continuing**
|
||||
================================
|
||||
--------------------------------------
|
||||
|
||||
**Before internal flashing, you must first disable `/dev/mem` protections. Make
|
||||
sure to re-enable them after you're finished.**
|
||||
|
|
@ -32,12 +42,11 @@ flashing, from an existing installation. If you're externally flashing the
|
|||
machine, you can ignore this advice.
|
||||
|
||||
Build dependencies
|
||||
==================
|
||||
------------------
|
||||
|
||||
**Please first [install build dependencies](../build/).**
|
||||
|
||||
Coreboot utilities
|
||||
------------------
|
||||
### Coreboot utilities
|
||||
|
||||
You need `cbfstool` from coreboot. For whatever board you have, check which
|
||||
coreboot tree it uses in Canoeboot's build system, cbmk. For example, let's
|
||||
|
|
@ -59,8 +68,7 @@ This will result in the following binary: `elf/cbfstool/default/cbfstool`
|
|||
We won't assume the path to cbfstool, in the remainder of this guide, so
|
||||
adapt accordingly.
|
||||
|
||||
GRUB utilities
|
||||
--------------
|
||||
### GRUB utilities
|
||||
|
||||
Again, let's assume the coreboot board is `x200_8mb`. Check the
|
||||
file `config/coreboot/x200_8mb/target.cfg` for `grubtree` - if it's not set,
|
||||
|
|
@ -72,8 +80,7 @@ This will compile GRUB for the given tree. If you need to use any of the GRUB
|
|||
utilities, this command will build them and in this example, they will be
|
||||
available under `src/grub/default/`.
|
||||
|
||||
Flashprog
|
||||
---------
|
||||
### Flashprog
|
||||
|
||||
Compile flashprog like so:
|
||||
|
||||
|
|
@ -82,7 +89,7 @@ Compile flashprog like so:
|
|||
A binary will appear at `elf/flashprog/flashprog`.
|
||||
|
||||
Default GRUB config
|
||||
===================
|
||||
-------------------
|
||||
|
||||
The coreboot image has its own filesystem, CBFS, and within CBFS is the GRUB
|
||||
binary, and within the GRUB binary is another filesystem called memdisk, where
|
||||
|
|
@ -91,10 +98,9 @@ the default GRUB configuration is located.
|
|||
You can override it by inserting your own GRUB config within CBFS.
|
||||
|
||||
Acquiring a GRUB config
|
||||
=======================
|
||||
-----------------------
|
||||
|
||||
Dump the boot flash
|
||||
-------------------
|
||||
### Dump the boot flash
|
||||
|
||||
This is only useful if you already inserted a GRUB config in CBFS. Otherwise,
|
||||
you can grab it from Canoeboot's build system, cbmk.
|
||||
|
|
@ -105,8 +111,7 @@ look at the [main flashing guide](../install/).
|
|||
|
||||
Those guides show how to dump the flash contents, which you are advised to do.
|
||||
|
||||
Default GRUB config location
|
||||
----------------------------
|
||||
### Default GRUB config location
|
||||
|
||||
We'll assume that your GRUB tree is `default`, so the
|
||||
file `config/grub/default/config/payload` is your GRUB config; this will be the
|
||||
|
|
@ -116,7 +121,7 @@ Modify *that* file, or the one you extracted if you already inserted a custom
|
|||
one before, and you will re-insert it when you're done.
|
||||
|
||||
Insert grubtest.cfg
|
||||
===================
|
||||
-------------------
|
||||
|
||||
Before reading the next section, please note: if you only have the fallback
|
||||
GRUB config in memdisk, and no configs in CBFS, you can test the modified
|
||||
|
|
@ -128,7 +133,7 @@ Canoeboot will not automatically load it, but it will be available from the
|
|||
default GRUB menu. This can be useful for test purposes, hence the name.
|
||||
|
||||
Insert new grub.cfg
|
||||
===================
|
||||
-------------------
|
||||
|
||||
If you already have a `grub.cfg` in cbfstool, you can extract and modify that
|
||||
one, e.g.:
|
||||
|
|
@ -155,7 +160,7 @@ test config from the default menu, before deciding whether to make it the
|
|||
main config, as `grub.cfg`, overriding the one in GRUB memdisk.
|
||||
|
||||
Flash the modified ROM image
|
||||
============================
|
||||
----------------------------
|
||||
|
||||
Check the [Canoeboot flashing guide](../install/) which says how to flash the
|
||||
new image.
|
||||
|
|
|
|||
|
|
@ -1,18 +1,47 @@
|
|||
---
|
||||
title: Hardening GRUB
|
||||
title: Hardening GRUB (i.e. Secure canoeBoot)
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
What is Secure canoeBoot?
|
||||
-------------------------
|
||||
|
||||
Canoeboot provides open source BIOS/UEFI firmware, replacing proprietary
|
||||
BIOS/UEFI firmware, and that precisely is Canoeboot primary mission; Canoeboot
|
||||
is a [Free Software](https://writefreesoftware.org/learn) project, *first*.
|
||||
Our *next* priority is to provide you with *highly secure* boot firmware, free
|
||||
from backdoors and with well-audited code. *This* document does just that, by
|
||||
telling you how to *harden* your Canoeboot installation against various physical
|
||||
access attacks.
|
||||
|
||||
### Not UEFI SecureBoot!
|
||||
|
||||
UEFI SecureBoot was invented by Microsoft for booting Microsoft Windows. We
|
||||
don't use UEFI SecureBoot in the Canoeboot project, because UEFI SecureBoot
|
||||
is *completely inferior* to Canoeboot's security model. We call our own
|
||||
security model *Secure canoeBoot* and we use neither BIOS nor UEFI; we use GRUB!
|
||||
|
||||
*Strong encryption* is the name of the game. You will use the *GRUB payload*.
|
||||
GRUB supports various security mechanisms that are not enabled by default.
|
||||
This page will tell you how to enable them, for the purpose of boot security,
|
||||
both detecting and attempting to prevent certain types of attack.
|
||||
|
||||
Please also expect to brick your machine at least once, because many of these
|
||||
changes are highly invasive and may even require you to *modify source code*.
|
||||
**Make sure you have an [external SPI programmer](../install/spi.md), for
|
||||
recovery purposes, just in case you brick your machine. The modifications
|
||||
documented here are highly invasive and it would be easy to make mistakes.**
|
||||
documented here are highly invasive. An external SPI programmer can be used
|
||||
to restore the previous working state, should a brick occur.**
|
||||
|
||||
Canoeboot's design philosophy is that the most non-technical user must be
|
||||
catered to first, which means that certain security hardening steps are skipped
|
||||
by default. With the steps documented here, you will be able to thwart many
|
||||
types of physical attack on your machine. Many of the types of configurations
|
||||
documented here are *unique*, and available only in Canoeboot! (or otherwise
|
||||
only *practical* in Canoeboot)
|
||||
|
||||
Full disk encryption
|
||||
====================
|
||||
--------------------
|
||||
|
||||
[Encrypted /boot with LUKS2 on argon2 key derivation is now
|
||||
possible](../../news/argon2.md) - the work is based on that done by
|
||||
|
|
@ -34,7 +63,7 @@ You are advised to do this *first*, because steps below depend on certain
|
|||
configuration changes to be made on your installed Linux distro.
|
||||
|
||||
**Dependencies (do this first)**
|
||||
=============================
|
||||
--------------------------------
|
||||
|
||||
**Please read this: [Modifying GRUB in CBFS](grub_cbfs.md)**
|
||||
|
||||
|
|
@ -43,15 +72,14 @@ which tells you what modifications to actually perform, whereas the guide
|
|||
linked above tells you how to apply your modifications for flashing.**
|
||||
|
||||
Flash write protection
|
||||
======================
|
||||
----------------------
|
||||
|
||||
Although not strictly related to GRUB, flash protection will prevent anyone
|
||||
except you from overwriting the flash without permission. This is important,
|
||||
because you don't want some malicious software running as root from overwriting
|
||||
your flash, thus removing any of the above protections.
|
||||
|
||||
Build-time write protect
|
||||
---------------------------
|
||||
### Build-time write protect
|
||||
|
||||
Let's assume your board is `x200_8mb`, do:
|
||||
|
||||
|
|
@ -83,8 +111,7 @@ Anyway, when you're done, save the config and then build it from source in cbmk.
|
|||
|
||||
See: [build from source](../build/)
|
||||
|
||||
IFD-based flash protection
|
||||
--------------------------
|
||||
### IFD-based flash protection
|
||||
|
||||
**NOTE: This CAN cause bricks on a lot of machines. You should use this with
|
||||
care. The FLILL and/or PRx based methods are more reliable - also SMM methods.
|
||||
|
|
@ -104,8 +131,7 @@ version matching the coreboot tree for your mainboard.
|
|||
Note that this only works for Intel-based systems that use an Intel Flash
|
||||
Descriptor, which is actually most Intel systems that Canoeboot supports.
|
||||
|
||||
Other facts
|
||||
-----------
|
||||
### Other facts
|
||||
|
||||
Strapping `HDA_SDO` or `HDA_DOCK_EN` requires physical access, because you have
|
||||
to short a pin on the HDA chip on the motherboard, or there will be a header
|
||||
|
|
@ -122,8 +148,7 @@ Enable `CONFIG_STRICT_DEVMEM` in your Linux kernel, or set `securelevel` above
|
|||
zero on your BSD setup (but BSD cannot be booted with GRUB very easily so
|
||||
it's a moot point).
|
||||
|
||||
FLILL
|
||||
-----
|
||||
### FLILL
|
||||
|
||||
On Intel Flash Descriptor, you can insert up to four (4) commands on a list
|
||||
within, called *FLILL*; not yet documented, but any SPI command listed here
|
||||
|
|
@ -131,14 +156,13 @@ would no longer work during internal flash operations. For example, you could
|
|||
use it to disable certain erase/write commands. You could also use it to
|
||||
disable *reads*.
|
||||
|
||||
PRx registers
|
||||
-------------
|
||||
### PRx registers
|
||||
|
||||
Protected Range registers are available on Intel platforms, to disable flash
|
||||
writes. This is not yet documented, and it varies per platform.
|
||||
|
||||
GRUB Password
|
||||
=============
|
||||
GRUB password
|
||||
-------------
|
||||
|
||||
The security of this setup depends on a good GRUB password as GPG signature
|
||||
checking can be disabled through the GRUB console with this command:
|
||||
|
|
@ -176,7 +200,7 @@ GRUB will also ask for a username in addition to the password; the "root" user
|
|||
is specified above, but you can cahnge it to whatever you want.
|
||||
|
||||
Unset superusers
|
||||
================
|
||||
----------------
|
||||
|
||||
Find this line in `grub.cfg`:
|
||||
|
||||
|
|
@ -191,7 +215,7 @@ because `unset superusers` in fact disables passwordh authentication, so it's
|
|||
very important that you comment out this line.
|
||||
|
||||
Disable the SeaBIOS menu
|
||||
====================
|
||||
------------------------
|
||||
|
||||
**Very important. Make sure you read this carefully.**
|
||||
|
||||
|
|
@ -219,8 +243,7 @@ Release images with `seagrub` in the name already have this bootorder file,
|
|||
so you only need to disable the menu on these images. If you have the
|
||||
image with `seabios` in the name (instead of `seagrub`), you must do both.
|
||||
|
||||
SeaBIOS option ROMs
|
||||
-------------------
|
||||
### SeaBIOS option ROMs
|
||||
|
||||
SeaBIOS will also still execute PCI option ROMs. Depending on your preference,
|
||||
you may wish to disable this, but please note that this will break certain
|
||||
|
|
@ -230,8 +253,7 @@ things like graphics cards. More information is available here:
|
|||
|
||||
If you're using a graphics card, you *need* VGA option ROMs at least.
|
||||
|
||||
GRUBSEA
|
||||
-------
|
||||
### GRUBSEA
|
||||
|
||||
Another option is to make it so that GRUB is the primary payload on your board.
|
||||
In this setup, SeaBIOS and U-Boot are still available.
|
||||
|
|
@ -251,7 +273,7 @@ and disable the SeaBIOS menu, making SeaBIOS load only GRUB; SeaGRUB is useful
|
|||
because GRUB will piggyback off of the VGA setup done by SeaBIOS first.
|
||||
|
||||
GPG keys
|
||||
========
|
||||
--------
|
||||
|
||||
First, generate a GPG keypair to use for signing. Option RSA (sign only)
|
||||
is ok.
|
||||
|
|
@ -293,7 +315,7 @@ into CBFS, using instructions already provided on the GRUB CBFS guide linked
|
|||
above, earlier on in this guide.
|
||||
|
||||
Enforce GPG check in GRUB
|
||||
=========================
|
||||
-------------------------
|
||||
|
||||
The following must be present in `grub.cfg`, but please note that the
|
||||
background image used by GRUB is in the memdisk by default, not CBFS, so you
|
||||
|
|
@ -312,7 +334,7 @@ the GRUB CBFS guide that was also linked above, earlier on in the article
|
|||
you're currently reading.
|
||||
|
||||
Install the new image
|
||||
=====================
|
||||
---------------------
|
||||
|
||||
Now simply flash the new image, using
|
||||
the [flashing instructions](../install/).
|
||||
|
|
@ -323,8 +345,29 @@ and the system is now unbootable, that's OK because you can use an
|
|||
external flasher; please
|
||||
read [external flashing instructions](../install/spi.md)
|
||||
|
||||
Linux kernel hardening
|
||||
----------------------
|
||||
|
||||
You may also wish to compile your own kernel, because distro kernels will always
|
||||
have code in the same place, so attackers are more easily able to know exactly
|
||||
where to attack your kernel (ROP-based attacks).
|
||||
|
||||
The Whonix/KickSecure Linux projects have guidance about Linux kernel
|
||||
hardening:
|
||||
|
||||
* <https://www.kicksecure.com/wiki/System_Hardening_Checklist>
|
||||
* <https://www.whonix.org/wiki/System_Hardening_Checklist>
|
||||
* <https://www.kicksecure.com/wiki/Operating_System_Hardening>
|
||||
|
||||
There's info there about userspace too, but start with kernel first. Canoeboot
|
||||
is a boot firmware project, so Linux kernel hardening is beyond the scope of
|
||||
the Canoeboot project documentation, **for now**.
|
||||
|
||||
(for now, because Canoeboot may in fact provide a Linux distro in the flash
|
||||
at some point, and this page will definitely be updated when that happens)
|
||||
|
||||
References
|
||||
==========
|
||||
----------
|
||||
|
||||
* [GRUB manual](https://www.gnu.org/software/grub/manual/html_node/Security.html#Security)
|
||||
* [GRUB info pages](http://git.savannah.gnu.org/cgit/grub.git/tree/docs/grub.texi)
|
||||
|
|
|
|||
|
|
@ -1,10 +1,15 @@
|
|||
---
|
||||
title: Linux guides
|
||||
title: Install Linux on a Canoeboot system
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Booting Linux from GRUB payload
|
||||
-------------------------------
|
||||
|
||||
NOTE: This guide pertains to x86 hosts, and does not cover supported CrOS/ARM
|
||||
chromebooks. For ARM targets, you should refer to u-boot documentation.
|
||||
chromebooks. For ARM targets, you should refer
|
||||
to [u-boot documentation](../uboot/) - separate [U-Boot x86
|
||||
documentation](../uboot/uboot-x86.md) is also available.
|
||||
|
||||
GRUB
|
||||
--------
|
||||
|
|
@ -17,51 +22,19 @@ on <https://seabios.org/SeaBIOS>
|
|||
Linux is generally assumed, especially for Canoeboot development, but Canoeboot
|
||||
also works quite nicely with [BSD systems](../bsd/).
|
||||
|
||||
Useful links
|
||||
============
|
||||
### Useful links
|
||||
|
||||
Refer to the following pages:
|
||||
Refer to these pages, hosted by the Canoeboot project:
|
||||
|
||||
* [How to Prepare and Boot a USB Installer in Canoeboot Systems](grub_boot_installer.md)
|
||||
* [Modifying the GRUB Configuration in Canoeboot Systems](grub_cbfs.md)
|
||||
* [How to Harden Your GRUB Configuration, for Security](grub_hardening.md)
|
||||
|
||||
NOTE ABOUT VGA MODES and GRUB
|
||||
=============================
|
||||
|
||||
Canoeboot does not support switching VGA modes, when coreboot's libgfxinit is
|
||||
used on Intel GPUs. Many distros will install GRUB, which Canoeboot then finds
|
||||
and executes, if running SeaBIOS payload; if using GRUB, just the distro's
|
||||
grub.cfg file is loaded instead, by Canoeboot's own GRUB in flash.
|
||||
|
||||
Canoeboot GRUB boots in text mode or uses the coreboot framebuffer. Anyway,
|
||||
set `GRUB_TERMINAL=console` in GRUB and you should be fine. This avoids GRUB,
|
||||
the one provided by your distro, switching video modes.
|
||||
|
||||
In Debian for example (steps largely the same on other distros):
|
||||
|
||||
Edit `/etc/default/grub` as root, and uncomment or add the line:
|
||||
|
||||
GRUB_TERMINAL=console
|
||||
|
||||
Then still as root, do these commands:
|
||||
|
||||
export PATH="$PATH:/sbin"
|
||||
update-grub
|
||||
|
||||
NOTE: `update-grub` is very much Debian-centric. Not all distros will have it.
|
||||
On Arch-based distros for instance, you might do:
|
||||
|
||||
grub-mkconfig -o /boot/grub/grub.cfg
|
||||
|
||||
The `update-grub` command is provided on Debian for user convenience, but on
|
||||
all distros, you may want to just use `grub-mkconfig`. Use what works for you.
|
||||
|
||||
Now your distro's GRUB menu should work, when your distro's GRUB bootloader is
|
||||
executed from Canoeboot's SeaBIOS payload.
|
||||
They will provide specific information; the information below pertains mostly
|
||||
to troubleshooting, and there are some notes about Full Disk Encryption:
|
||||
|
||||
Encrypted /boot via LUKS2 with argon2
|
||||
=======================================
|
||||
-------------------------------------
|
||||
|
||||
Full encryption for basic LUKS2 (with PBKDF or argon2 key derivation) is
|
||||
supported in Canoeboot. Legacy LUKS1 is also supported. On *most* other
|
||||
|
|
@ -109,8 +82,7 @@ At the time of the Canoeboot 20231026 release, the GRUB upstream (on gnu.org)
|
|||
did not have these argon2 patches in its source tree, but Canoeboot merges and
|
||||
maintains them out of tree.
|
||||
|
||||
argon2id
|
||||
--------
|
||||
### argon2id
|
||||
|
||||
You should *specifically* use argon2id. Please ensure this, because some
|
||||
older LUKS2 setups defaulted to the weaker *argon2i*. This post by Matthew
|
||||
|
|
@ -118,10 +90,46 @@ Garret contains information about that:
|
|||
|
||||
<https://mjg59.dreamwidth.org/66429.html>
|
||||
|
||||
Canoeboot's GRUB Argon2id implementation was created by Patrick Steinhardt,
|
||||
who adapted PHC's Argon2 implementation for use in GRUB; Ax33l later added it
|
||||
to Arch Linux AUR for GRUB 2.06, and Nicholas Johnson rebased *that* for
|
||||
GRUB 2.12 so that Canoeboot could use it; Canoeboot later inherited it.
|
||||
|
||||
NOTE: You should also read the instructions about about `GRUB_TERMINAL`.
|
||||
|
||||
NOTE ABOUT VGA MODES and GRUB
|
||||
-----------------------------
|
||||
|
||||
Canoeboot does not support switching VGA modes, when coreboot's libgfxinit is
|
||||
used on Intel GPUs. Many distros will install GRUB, which Canoeboot then finds
|
||||
and executes, if running SeaBIOS payload; if using GRUB, just the distro's
|
||||
grub.cfg file is loaded instead, by Canoeboot's own GRUB in flash.
|
||||
|
||||
Canoeboot GRUB boots in text mode or uses the coreboot framebuffer. Anyway,
|
||||
set `GRUB_TERMINAL=console` in GRUB and you should be fine. This avoids GRUB,
|
||||
the one provided by your distro, switching video modes.
|
||||
|
||||
In Debian for example (steps largely the same on other distros):
|
||||
|
||||
Edit `/etc/default/grub` as root, and uncomment or add the line:
|
||||
|
||||
GRUB_TERMINAL=console
|
||||
|
||||
Then still as root, do these commands:
|
||||
|
||||
export PATH="$PATH:/sbin"
|
||||
update-grub
|
||||
|
||||
NOTE: `update-grub` is very much Debian-centric. Not all distros will have it.
|
||||
On Arch-based distros for instance, you might do:
|
||||
|
||||
grub-mkconfig -o /boot/grub/grub.cfg
|
||||
|
||||
Now your distro's GRUB menu should work, when your distro's GRUB bootloader is
|
||||
executed from Canoeboot's SeaBIOS payload.
|
||||
|
||||
Rebooting system in case of freeze
|
||||
===================================
|
||||
----------------------------------
|
||||
|
||||
Linux kernel has a feature to do actions to the system any time, even
|
||||
with it freezes, this is called a
|
||||
|
|
@ -139,13 +147,12 @@ command line paramter. So append `sysrq_always_enabled=1` to your
|
|||
You can also run `# sysctl kernel.sysrq=1` to enable them.
|
||||
|
||||
Fedora won't boot?
|
||||
==================
|
||||
------------------
|
||||
|
||||
This may also apply to CentOS or Redhat. Chroot guide can be found on
|
||||
[fedora website](https://docs.fedoraproject.org/en-US/quick-docs/bootloading-with-grub2/#restoring-bootloader-using-live-disk)
|
||||
|
||||
linux16 issue
|
||||
-------------
|
||||
### linux16 issue
|
||||
|
||||
Canoeboot's default GRUB config sources fedora's grub config
|
||||
`grub.cfg` (in `/boot/grub2/grub.cfg`), fedora by default makes use of the
|
||||
|
|
@ -159,8 +166,7 @@ Set the `sixteenbit` variable to an empty string, then run:
|
|||
|
||||
grub2-mkconfig -o /boot/grub2/grub.cfg
|
||||
|
||||
BLS issue
|
||||
---------
|
||||
### BLS issue
|
||||
|
||||
With [newer versions of fedora](https://fedoraproject.org/wiki/Changes/BootLoaderSpecByDefault),
|
||||
scripts from grub package default to generating [BLS](https://www.freedesktop.org/wiki/Specifications/BootLoaderSpec/)
|
||||
|
|
@ -172,3 +178,6 @@ to `/etc/default/grub` (or modify existing one if it already exists):
|
|||
Then generate `grub.cfg` with:
|
||||
|
||||
grub2-mkconfig -o /boot/grub2/grub.cfg
|
||||
|
||||
These idiosyncrasies aside, Fedora is a great distro. It's well-tested with the
|
||||
Canoeboot build system, and it boots up just fine.
|
||||
|
|
|
|||
|
|
@ -1,10 +1,16 @@
|
|||
---
|
||||
title: cbmk maintenance manual
|
||||
title: CanoeBoot MaKe (cbmk) build system design and maintenance manual
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
NOTE: Canoeboot standardises on [flashprog](https://flashprog.org/wiki/Flashprog)
|
||||
now, as of 3 May 2024, which is a fork of flashrom.
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
Canoeboot is a [Free Software](https://writefreesoftware.org/learn) project,
|
||||
replacing proprietary BIOS/UEFI firmware. It provides coreboot and a number
|
||||
of *payloads* such as GRUB, U-Boot or SeaBIOS, which boot your operating system.
|
||||
This document describes the very essence of Canoeboot's design, how the project
|
||||
functions and how releases are made.
|
||||
|
||||
In addition to this manual, you should also refer to [porting.md](porting.md)
|
||||
and [testing.md](testing.md).
|
||||
|
|
@ -19,7 +25,7 @@ are kept in sync. You should therefore also read Libreboot's own
|
|||
about the porting process is written on the [about](../../about.md) page.
|
||||
|
||||
Automated coreboot build system
|
||||
===============================
|
||||
-------------------------------
|
||||
|
||||
This document describes the entire Canoeboot build system, its design philosophy
|
||||
and how it's used to prepare Canoeboot releases; it is provided as a *reference*
|
||||
|
|
@ -45,7 +51,7 @@ first, it will do so automatically. Therefore, you can run any part of cbmk
|
|||
on its own, and the entire design is modular.
|
||||
|
||||
Best practises for learning cbmk
|
||||
================================
|
||||
--------------------------------
|
||||
|
||||
The follow sections will cover subdirectories, within cbmk. Contrary to what
|
||||
some may otherwise assume, it's best to learn about everything *except* scripts
|
||||
|
|
@ -63,8 +69,7 @@ bottom-up; most documents take the latter approach, in other projects, but
|
|||
most people naturally want to learn how a specific thing works first, hence
|
||||
the approach taken here.
|
||||
|
||||
Don't be deceived by simplicity
|
||||
-------------------------------
|
||||
### Don't be deceived by simplicity
|
||||
|
||||
Canoeboot's build system is powerful, and highly configurable, yet deceptively
|
||||
simple at the same time. Remember this rule, a rule that applies to *all*
|
||||
|
|
@ -75,12 +80,11 @@ Many people will be shocked by how *small* Canoeboot is, at its core. You will
|
|||
be surprised by just how much can be done with so little. Continue reading!
|
||||
|
||||
System requirements
|
||||
===================
|
||||
-------------------
|
||||
|
||||
This concerns system requirements when *building* Canoeboot.
|
||||
|
||||
Operating system
|
||||
----------------
|
||||
### Operating system
|
||||
|
||||
Any sensible Linux distribution will do. Canoeboot's build system is regularly
|
||||
testing on all the major distros. Please do report bugs if you encounter
|
||||
|
|
@ -97,18 +101,16 @@ Alpine, though we currently do not have an automated way to install
|
|||
build dependencies for these distros.
|
||||
|
||||
NOTE: **Linux** is assumed. BSD systems may work, for parts of the build system,
|
||||
but BSD systems are currently not well-tested with lbmk.
|
||||
but BSD systems are currently not well-tested with cbmk.
|
||||
|
||||
**Dependencies**
|
||||
----------------
|
||||
### **Dependencies**
|
||||
|
||||
**Make sure you have dependencies installed!**
|
||||
|
||||
**The [main build guide](../build) will tell you how to install dependencies,
|
||||
such as GNU toolchains and various libraries.**
|
||||
|
||||
Host CPU
|
||||
--------
|
||||
### Host CPU
|
||||
|
||||
At least an Intel Core 2 Duo, though we recommend much faster CPUs if building
|
||||
entire release archives, e.g. quad-core Haswell CPU or better.
|
||||
|
|
@ -123,8 +125,7 @@ NOTE3: *32-bit* x86 (i686) machines can be used to compile Canoeboot, but
|
|||
MemTest86\+ is only compiled for 64-bit, and not cross compiled, so builds
|
||||
are disabled when cbmk detects a 32-bit host CPU.
|
||||
|
||||
Memory
|
||||
------
|
||||
### Memory
|
||||
|
||||
At least 2GB per CPU core, ideally 4GB; for example, 16GB RAM is recommended
|
||||
if you're compiling an a quad-core CPU.
|
||||
|
|
@ -135,8 +136,7 @@ For example, when you're building on a quad-core, do this prior to building:
|
|||
|
||||
export XBMK_THREADS=4
|
||||
|
||||
Disk space
|
||||
----------
|
||||
### Disk space
|
||||
|
||||
About 20GB bare minimum, if only compiling for 1 board. The sources take up a
|
||||
lot of space. However, Canoeboot is always expanding as it's developed.
|
||||
|
|
@ -149,10 +149,9 @@ major bottleneck, so any HDD or SSD will do, but we obviously recommend a
|
|||
fast NVMe (PCI-E) SSD if you can.
|
||||
|
||||
Environmental variables
|
||||
=======================
|
||||
-----------------------
|
||||
|
||||
XBMK\_THREADS
|
||||
-------------
|
||||
### XBMK\_THREADS
|
||||
|
||||
For example:
|
||||
|
||||
|
|
@ -163,8 +162,7 @@ This would build on two threads, when running cbmk. It defaults to 1.
|
|||
Previous revisions of cbmk used `nproc` by default, but this was set to 1
|
||||
instead, because nproc is not available on every operating system.
|
||||
|
||||
XBMK\_RELEASE
|
||||
-------------
|
||||
### XBMK\_RELEASE
|
||||
|
||||
If set to `y`, it signals to `script/roms` that a release is being built,
|
||||
and it will honour `release="n"` in target.cfg files. You could also set this
|
||||
|
|
@ -174,7 +172,7 @@ behaves running it in release mode. Do this if you want to:
|
|||
export XBMK_RELEASE=y
|
||||
|
||||
Projects/files downloaded/generated by cbmk
|
||||
===========================================
|
||||
--------------------------------------------
|
||||
|
||||
The following sections will describe files and directories that are not
|
||||
included in `cbmk.git`, but *are* created by running various cbmk commands;
|
||||
|
|
@ -183,8 +181,7 @@ many of these will also be provided, pre-generated, under release archives.
|
|||
Some of these are *downloaded* by Canoeboot's build system, automatically, while
|
||||
others are created during the build process based on these downloaded programs.
|
||||
|
||||
bin/
|
||||
---------------
|
||||
### bin/
|
||||
|
||||
This directory is created when running any of the following commands, with the
|
||||
right arguments:
|
||||
|
|
@ -208,14 +205,12 @@ now only puts coreboot images in `bin/`, with payloads included.
|
|||
If you still have `elf/` coreboot images in your cbmk tree, please do not
|
||||
use them (and you may aswell delete them).
|
||||
|
||||
cache/
|
||||
---------------
|
||||
### cache/
|
||||
|
||||
Certain files are cached here automatically, by cbmk. The user need not touch
|
||||
these files.
|
||||
|
||||
cache/file/
|
||||
--------------
|
||||
### cache/file/
|
||||
|
||||
Files that are downloaded are hashed, and the cached version of the file
|
||||
is stored there, named as the SHA512 checksum. This is used for submodule Git
|
||||
|
|
@ -229,8 +224,7 @@ files relative to the directory locations for those repositories, but subfiles
|
|||
are not downloaded to the *cached git repository*, only the work directory used
|
||||
for building in cbmk.
|
||||
|
||||
cache/hash
|
||||
---------------
|
||||
### cache/hash/
|
||||
|
||||
When cbmk is handling any project, it sorts a list of files under `config/`
|
||||
including `config/project` (or `config/project/TREE`) and `config/data/project`.
|
||||
|
|
@ -243,14 +237,12 @@ If the currently stored hash differs from what's calculated, it means that
|
|||
the project has changed, and the source directories plus builds are deleted.
|
||||
The project source is then re-prepared and re-build.
|
||||
|
||||
cache/repo
|
||||
--------------
|
||||
### cache/repo/
|
||||
|
||||
Git repositories are cached here. This avoids wasting bandwidth, when downloading
|
||||
multiple repositories. **Git submodules are also cached here!**
|
||||
|
||||
elf/
|
||||
---------------
|
||||
### elf/
|
||||
|
||||
**DO NOT flash coreboot ROM images contained under `elf/`. Please use ROM images
|
||||
under `bin/` instead! - In modern cbmk, only the ones under `bin/` are ever
|
||||
|
|
@ -285,8 +277,7 @@ As of Canoeboot 20240612, the `elf/` directory must be used by default for all
|
|||
builds, in an effort to make exclusive use of *out-of-source builds*. As such,
|
||||
the `cbutils` directory is no longer used.
|
||||
|
||||
release/
|
||||
---------------
|
||||
### release/
|
||||
|
||||
The script at `build` create tarballs in here, which
|
||||
constitute regular Canoeboot releases. It is meticulously maintained, as per
|
||||
|
|
@ -315,13 +306,11 @@ Or with a custom directory:
|
|||
The build system expects there to be a *git tag*, so make sure there is one.
|
||||
This is used to create the version number for a given release.
|
||||
|
||||
src/
|
||||
----
|
||||
### src/
|
||||
|
||||
Third-party source trees are downloaded into this directory, by cbmk.
|
||||
|
||||
src/coreboot/
|
||||
---------------
|
||||
### src/coreboot/
|
||||
|
||||
Please also visit: <https://coreboot.org/>
|
||||
|
||||
|
|
@ -340,8 +329,7 @@ This may be less efficient on disk usage, but it simplifies the logic greatly.
|
|||
Coreboot also uses its own toolchain called *crossgcc*, and crossgcc is in fact
|
||||
compiled *per tree* in Canoeboot.
|
||||
|
||||
src/flashprog/
|
||||
---------------
|
||||
### src/flashprog/
|
||||
|
||||
Please also visit: <https://flashprog.org/>
|
||||
|
||||
|
|
@ -350,8 +338,7 @@ convenience of users, and this is copied to release archives. Flashprog is the
|
|||
program that you will use to read, erase and write the flash, containing
|
||||
coreboot firmware.
|
||||
|
||||
src/gpio-scripts
|
||||
----------------
|
||||
### src/gpio-scripts
|
||||
|
||||
This is a fork of the original gpio-scripts. The fork is maintained by Riku
|
||||
Viitanen, based on code written by Angel Pons (author of the Haswell native
|
||||
|
|
@ -362,8 +349,7 @@ machines, when porting new boards to coreboot.
|
|||
NOTE: Not included in Canoeboot yet, but `intelp2m` is used instead for this
|
||||
purpose, on much newer Intel systems (from around Skylake era or later).
|
||||
|
||||
src/grub/TREE
|
||||
---------------
|
||||
### src/grub/TREE
|
||||
|
||||
Please also visit: <https://www.gnu.org/software/grub/>
|
||||
|
||||
|
|
@ -396,25 +382,19 @@ tree contains NVMe SSD support but not xHCI support. The `default` tree contains
|
|||
no NVMe or xHCI support. All trees otherwise have the same fixes on top of
|
||||
upstream GRUB, e.g. fix for Dell Latitude keyboard controllers.
|
||||
|
||||
src/int/
|
||||
--------
|
||||
### src/int/
|
||||
|
||||
Riku Viitanen wrote this tool for debugging, when implementing MXM option ROM
|
||||
support in coreboot and SeaBIOS, for the HP EliteBook 8560w.
|
||||
|
||||
NOTE: The EliteBook 8560w isn't actually supported in Canoeboot yet, but this
|
||||
could be used for other boards in the future.
|
||||
|
||||
src/memtest86plus/
|
||||
---------------
|
||||
### src/memtest86plus/
|
||||
|
||||
Please also visit: <https://www.memtest.org/>
|
||||
|
||||
This is provided inside ROM images, as a payload executed from main GRUB or
|
||||
SeaBIOS payload. It checks for corrupted memory.
|
||||
|
||||
src/mxmdump/
|
||||
------------
|
||||
### src/mxmdump/
|
||||
|
||||
Riku Viitanen wrote this utility, for dumping the MXM config on graphics cards
|
||||
that use it. The HP EliteBook 8560w uses these cards, and normally you would
|
||||
|
|
@ -430,8 +410,7 @@ this fact, but such hacks are no longer required because of Riku's tool.
|
|||
NOTE: The EliteBook 8560w isn't supported in Canoeboot yet, but this tool
|
||||
could be used for other machines in the future.
|
||||
|
||||
src/seabios/
|
||||
---------------
|
||||
### src/seabios/
|
||||
|
||||
Please also visit: <https://www.seabios.org/SeaBIOS>
|
||||
|
||||
|
|
@ -443,8 +422,7 @@ particular, the BSD bootloaders can be executed from SeaBIOS.
|
|||
This is provided as a coreboot payload, either as first payload or it can be
|
||||
executed from GRUB (if GRUB is the main payload, on a given target).
|
||||
|
||||
src/u-boot/
|
||||
---------------
|
||||
### src/u-boot/
|
||||
|
||||
Please also visit: <https://www.denx.de/project/u-boot/>
|
||||
|
||||
|
|
@ -461,8 +439,7 @@ More information can be found on the [U-Boot x86 page](../install/uboot-x86.md);
|
|||
it is available as an alternative to the traditional SeaBIOS and GRUB payloads,
|
||||
and it can successfully boot UEFI applications on x86 Canoeboot systems.
|
||||
|
||||
src/pcsx-redux
|
||||
----------------
|
||||
### src/pcsx-redux/
|
||||
|
||||
PCSX-Redux is a Sony Playstation (PS1/PSX) emulator, but Canoeboot only uses
|
||||
one part from it: the Open BIOS. This is used by Canoeboot to provide an
|
||||
|
|
@ -473,8 +450,7 @@ More information available on the [PlayStation page](../install/playstation.md).
|
|||
This is automatically compiled by the main build script, and the resulting
|
||||
BIOS image is provided in Canoeboot release archives.
|
||||
|
||||
src/pico-serprog
|
||||
---------------------------
|
||||
### src/pico-serprog/
|
||||
|
||||
Used by cbmk, to build firmware for serprog-based SPI flashers with RP2040 SoC.
|
||||
Alongside this, `util-fw/rp2040/pico-sdk` is imported which is required for
|
||||
|
|
@ -485,8 +461,7 @@ Please visit these pages:
|
|||
* <https://github.com/raspberrypi/pico-sdk>
|
||||
* <https://codeberg.org/libreboot/pico-serprog>
|
||||
|
||||
src/stm32-vserprog
|
||||
----------------------
|
||||
### src/stm32-vserprog/
|
||||
|
||||
Used by cbmk, to build firmware for serprog-based SPI flashers with STM32 MCU.
|
||||
Alongside this, `libopencm3` is imported which is required for building it.
|
||||
|
|
@ -501,8 +476,7 @@ Before moving onto configurations, we will now cover *utilities* provided by
|
|||
Canoeboot itself (included within cbmk, rather than being downloaded like the
|
||||
third party projects listed above):
|
||||
|
||||
tmp/
|
||||
---------------
|
||||
### tmp/
|
||||
|
||||
The `TMPDIR` environmental variable is set by cbmk, to a location under `/tmp`,
|
||||
but some users may have `/tmp` mounted as a *tmpfs* (file system in RAM), and
|
||||
|
|
@ -512,7 +486,7 @@ Where large files (or a large number of files) are handled by cbmk on a
|
|||
temporary basis, this `tmp/` directory is created and then used.
|
||||
|
||||
util/
|
||||
===============
|
||||
-----
|
||||
|
||||
If a codebase is not frequently used by Canoeboot, is actively developed (making
|
||||
it not viable to maintain in Canoeboot) or the codebase is very large, we would
|
||||
|
|
@ -522,8 +496,7 @@ where the intention is that `cbmk.git` itself should be small and efficient.
|
|||
Where appropriate, and where the code is small enough, or it is otherwise deemed
|
||||
desirable, `cbmk.git` provides a few utilities as part of itself, namely:
|
||||
|
||||
util/dell-flash-unlock/
|
||||
---------------
|
||||
### util/dell-flash-unlock/
|
||||
|
||||
This program, written by Nicholas Chin, unlocks the boot flash on Dell Latitude
|
||||
E6400; it permits internal flashing, from factory firmware to Canoeboot, so that
|
||||
|
|
@ -532,8 +505,7 @@ the user need not disassemble and flash externally.
|
|||
It also supports several other Dell laptops, with similar ECs. Check the
|
||||
README file included in this directory, for more information.
|
||||
|
||||
util/nvmutil/
|
||||
---------------
|
||||
### util/nvmutil/
|
||||
|
||||
The `nvmutil` software allows you to set the MAC address on Intel GbE NVM
|
||||
files. It also allows you to set *random* MAC addresses, in addition to
|
||||
|
|
@ -544,8 +516,7 @@ about here:
|
|||
|
||||
[nvmutil manual](../install/nvmutil.md)
|
||||
|
||||
util/spkmodem\_recv/
|
||||
---------------
|
||||
### util/spkmodem\_recv/
|
||||
|
||||
Canoeboot imported this from coreboot, who is turn imported it from GRUB with
|
||||
little to no modification.
|
||||
|
|
@ -582,13 +553,12 @@ do this. Other improvemnts include:
|
|||
by cbmk:
|
||||
|
||||
config/
|
||||
=======
|
||||
-------
|
||||
|
||||
This directory contains configuration files, used by the Canoeboot build
|
||||
system. These next sections will cover specific configuration files.
|
||||
|
||||
config/PROJECT\*/nuke.list
|
||||
--------------------------
|
||||
### config/PROJECT\*/nuke.list
|
||||
|
||||
The script `include/git.sh` handles deletion of certain files, for downloaded
|
||||
projects, based on a `nuke.list` file that can (for single-tree projects) be
|
||||
|
|
@ -606,10 +576,9 @@ foo/bar.txt
|
|||
Ditto `src/flashprog/`, if you wanted to delete a file from in there, as one
|
||||
other example. Deletions occur when the source tree is created.
|
||||
|
||||
config/coreboot
|
||||
---------------
|
||||
### config/coreboot/
|
||||
|
||||
### config/coreboot/BOARDNAME/
|
||||
#### config/coreboot/BOARDNAME/
|
||||
|
||||
Each target name (e.g. `x200_8mb`) has its own directory under here. Targets
|
||||
that do not define defconfigs also exist here; for example, the `default`
|
||||
|
|
@ -621,14 +590,14 @@ for example, be `default`. In other words, they can refer to other trees.
|
|||
The coreboot downloads are based on scanning of these directories, and ROM
|
||||
images are also built based on them.
|
||||
|
||||
### config/coreboot/BOARDNAME/patches/
|
||||
#### config/coreboot/BOARDNAME/patches/
|
||||
|
||||
For any given coreboot tree, patches with the `patch` file extension are placed
|
||||
here, alphanumerically in the order that they should be applied.
|
||||
|
||||
These patches are then so applied, when cbmk downloads the given source tree.
|
||||
|
||||
### config/coreboot/BOARDNAME/target.cfg
|
||||
#### config/coreboot/BOARDNAME/target.cfg
|
||||
|
||||
This file can contain several configuration lines, each being a string, such
|
||||
as:
|
||||
|
|
@ -738,7 +707,7 @@ by this variable, to also be present.
|
|||
The `grubtree` option specifies which GRUB tree to use. If unset, it defers to
|
||||
the `default` GRUB tree.
|
||||
|
||||
### config/coreboot/BOARDNAME/config/
|
||||
#### config/coreboot/BOARDNAME/config/
|
||||
|
||||
Files in this directory are *coreboot* configuration files.
|
||||
|
||||
|
|
@ -816,8 +785,7 @@ Even if your board doesn't actually use `libgfxinit`, the config for it should
|
|||
still be named as such. From a user's perspective, it really makes no
|
||||
difference.
|
||||
|
||||
config/dependencies/
|
||||
---------------
|
||||
### config/dependencies/
|
||||
|
||||
Files here are so named, and called like so: e.g. the `debian` file would be
|
||||
referenced when running:
|
||||
|
|
@ -828,8 +796,7 @@ These files define a list of packages, and the correct package manager command
|
|||
to use on a given distro. This can be used to install build dependencies, which
|
||||
are required for compiling Canoeboot from source code.
|
||||
|
||||
config/git/
|
||||
---------------
|
||||
### config/git/
|
||||
|
||||
Configuration related to third-party Git repositories, that Canoeboot makes
|
||||
use of.
|
||||
|
|
@ -844,8 +811,7 @@ of their own; for example, `config/grub/` exists.
|
|||
Multiple files exist here, and they are *concatenated* in a temporary file by
|
||||
cbmk, which is then scanned to find information about projects.
|
||||
|
||||
config/data/PROJECT/mkhelper.cfg
|
||||
--------------------------------
|
||||
### config/data/PROJECT/mkhelper.cfg
|
||||
|
||||
These `mkhelper.cfg` files define common configuration that can be supplied
|
||||
for any single- or multi-tree project. Arguments available are as follows:
|
||||
|
|
@ -890,18 +856,17 @@ In the simplest of terms, you may regard mkhelpers as *plugins*, of a sort.
|
|||
They simply extend the core functionality of the build system, in a way that
|
||||
can differ flexibly between projects.
|
||||
|
||||
GRUB config
|
||||
---------------
|
||||
### GRUB config
|
||||
|
||||
### config/data/grub/background
|
||||
#### config/data/grub/background/
|
||||
|
||||
Splash screen images applied duing startup when using the GRUB payload.
|
||||
|
||||
### config/data/grub/background/background1024x768.png
|
||||
#### config/data/grub/background/background1024x768.png
|
||||
|
||||
Used on ThinkPad X60 and T60.
|
||||
|
||||
### config/data/grub/background/background1280x800.png
|
||||
#### config/data/grub/background/background1280x800.png
|
||||
|
||||
Used on all other machines, besides X60 and T60 thinkpads.
|
||||
|
||||
|
|
@ -911,23 +876,23 @@ example, `config/coreboot/x60/target.cfg` specifies this:
|
|||
|
||||
grub_background="background1024x768.png"
|
||||
|
||||
### config/data/grub/background/COPYING
|
||||
#### config/data/grub/background/COPYING
|
||||
|
||||
Licensing info for GRUB bootsplash images.
|
||||
|
||||
### config/grub/TREE/config/
|
||||
#### config/grub/TREE/config/
|
||||
|
||||
GRUB configuration files.
|
||||
|
||||
### config/grub/config/AUTHORS
|
||||
#### config/grub/config/AUTHORS
|
||||
|
||||
Author info for GRUB configuration files.
|
||||
|
||||
### config/grub/config/COPYING
|
||||
#### config/grub/config/COPYING
|
||||
|
||||
Licensing info for GRUB configuration files.
|
||||
|
||||
### config/grub/TREE/config/payload
|
||||
#### config/grub/TREE/config/payload
|
||||
|
||||
This is a configuration file. It is used to program GRUB's shell.
|
||||
|
||||
|
|
@ -941,7 +906,7 @@ A `grubtest.cfg` can be inserted into CBFS, but it will not override the
|
|||
default `grub.cfg` (either in CBFS or on memdisk); however, the one in memdisk
|
||||
will provide a menuentry for switching to this, if available.
|
||||
|
||||
### config/data/grub/memdisk.cfg
|
||||
#### config/data/grub/memdisk.cfg
|
||||
|
||||
This GRUB configuration checks whether `grub.cfg` exists in CBFS and switches
|
||||
to that first (not provided by default) or, if one is not available in CBFS,
|
||||
|
|
@ -951,12 +916,12 @@ The GRUB memdisk is a file system within `grub.elf`, itself stored within the
|
|||
coreboot file system named *CBFS*, which is part of the coreboot ROM image on
|
||||
every coreboot target.
|
||||
|
||||
### config/data/grub/keymap/
|
||||
#### config/data/grub/keymap/
|
||||
|
||||
Keymap files used by GRUB. They can alter the character set corresponding to
|
||||
inputted scancodes.
|
||||
|
||||
### config/data/grub/keymap/\*.gkb
|
||||
#### config/data/grub/keymap/\*.gkb
|
||||
|
||||
The keymap files themselves. These are inserted into the GRUB memdisk, and
|
||||
the `grub.cfg` file can specify which one is to be used.
|
||||
|
|
@ -965,7 +930,7 @@ These files are binary-encoded, defining which characters correspond to which
|
|||
scancodes. It is handled by `grub-core/commands/keylayouts.c` in the GRUB source
|
||||
code.
|
||||
|
||||
### config/data/grub/module/TREE
|
||||
#### config/data/grub/module/TREE
|
||||
|
||||
This defines which modules are inserted into `grub.elf`. These modules can be
|
||||
anything from file systems, small applications/utilities, launchers (e.g.
|
||||
|
|
@ -979,7 +944,7 @@ This list is used by cbmk when it runs `grub-mkstandalone`, which is the utility
|
|||
from GRUB that generates `grub.elf` files (to be compressed inside CBFS and then
|
||||
executed as a coreboot payload).
|
||||
|
||||
### config/grub/TREE/patches/
|
||||
#### config/grub/TREE/patches/
|
||||
|
||||
For a given GRUB revision, patches with the `patch` file extension are placed
|
||||
here, alphanumerically in the order that they should be applied. For example,
|
||||
|
|
@ -988,69 +953,66 @@ partitions to be decrypted by GRUB.
|
|||
|
||||
These patches are then so applied, when cbmk downloads the given source tree.
|
||||
|
||||
config/ifd/\*
|
||||
---------------
|
||||
### config/ifd/\*
|
||||
|
||||
Intel Flash Descriptors and GbE NVM images, which are binary-encoded
|
||||
configuration files. These files are referenced in coreboot defconfigs, used
|
||||
by cbmk to build coreboot ROM images.
|
||||
|
||||
config/seabios/
|
||||
---------------
|
||||
### config/seabios/
|
||||
|
||||
### config/data/seabios/build.list
|
||||
#### config/data/seabios/build.list
|
||||
|
||||
When a given SeaBIOS tree is compiled, for a given target, this file defines
|
||||
which files to copy from the `seabios/` directory, which are then copied to
|
||||
a location under `elf/seabios`.
|
||||
|
||||
### config/seabios/default/
|
||||
#### config/seabios/default/
|
||||
|
||||
Currently the only tree in use, this defines what SeaBIOS revision is to be
|
||||
used, when the SeaBIOS payload is enabled on a given coreboot target.
|
||||
|
||||
### config/seabios/default/config/
|
||||
#### config/seabios/default/config/
|
||||
|
||||
Configuration files go in here.
|
||||
|
||||
### config/seabios/default/config/libgfxinit
|
||||
#### config/seabios/default/config/libgfxinit
|
||||
|
||||
Configuration file for when native video initialisation is available in
|
||||
coreboot.
|
||||
|
||||
### config/seabios/default/config/normal
|
||||
#### config/seabios/default/config/normal
|
||||
|
||||
Configuration file for when native video initialisation is unavailable in
|
||||
coreboot, and VGA ROM initialisation is also not provided by coreboot (in
|
||||
this configuration, the usual setup will be that *SeaBIOS* finds and
|
||||
executes them, instead of coreboot).
|
||||
|
||||
### config/seabios/default/config/vgarom
|
||||
#### config/seabios/default/config/vgarom
|
||||
|
||||
Configuration file for when native video initialisation is unavailable in
|
||||
coreboot, and VGA ROM initialisation is provided by coreboot; in this setup,
|
||||
SeaBIOS should not execute VGA ROMs.
|
||||
|
||||
### config/seabios/default/target.cfg
|
||||
#### config/seabios/default/target.cfg
|
||||
|
||||
Similar concept to `target.cfg` files provided by coreboot. This specifies
|
||||
which SeaBIOS revision (from Git) is to be used, when compiling SeaBIOS images.
|
||||
|
||||
config/u-boot/
|
||||
---------------
|
||||
### config/u-boot/
|
||||
|
||||
This directory contains configuration, patches and so on, for each mainboard
|
||||
that can use U-Boot as a payload in the `cbmk` build system. U-Boot doesn't yet
|
||||
have reliable generic configurations that can work across all coreboot boards
|
||||
(per-architecture), so these are used to build it per-board.
|
||||
|
||||
### config/data/u-boot/build.list
|
||||
#### config/data/u-boot/build.list
|
||||
|
||||
When a given U-Boot tree is compiled, for a given target, this file defines
|
||||
which files to copy from the U-Boot source build, which are then copied to
|
||||
a location under `elf/u-boot/`.
|
||||
|
||||
### config/u-boot/TREENAME/
|
||||
#### config/u-boot/TREENAME/
|
||||
|
||||
Each `TREENAME` directory defines configuration for a corresponding mainboard.
|
||||
It doesn't actually have to be for a board; it can also be used to just define
|
||||
|
|
@ -1058,14 +1020,14 @@ a U-Boot revision, with patches and so on. To enable use as a payload in ROM
|
|||
images, this must have the same name as its `config/coreboot/TREENAME/`
|
||||
counterpart.
|
||||
|
||||
### config/u-boot/TREENAME/patches/
|
||||
#### config/u-boot/TREENAME/patches/
|
||||
|
||||
For any given U-Boot tree, patches with the `patch` file extension are placed
|
||||
here, alphanumerically in the order that they should be applied.
|
||||
|
||||
These patches are then so applied, when cbmk downloads the given source tree.
|
||||
|
||||
### config/u-boot/TREENAME/target.cfg
|
||||
#### config/u-boot/TREENAME/target.cfg
|
||||
|
||||
This file can contain several configuration lines, each being a string, such
|
||||
as:
|
||||
|
|
@ -1101,7 +1063,7 @@ to a non-native arch means that necessary crossgcc-arch will be compiled and be
|
|||
available when building roms, but not necessarily built or discovered when
|
||||
individual scripts are called manually.*
|
||||
|
||||
### config/u-boot/TREENAME/config/
|
||||
#### config/u-boot/TREENAME/config/
|
||||
|
||||
Files in this directory are *U-Boot* configuration files. Configuration file
|
||||
names can be anything, but for now `default` is the only one used.
|
||||
|
|
@ -1131,8 +1093,7 @@ Another interesting config option is `CONFIG_POSITION_INDEPENDENT` for ARM
|
|||
boards, which has been so far enabled in the ones `cbmk` supports, just to be
|
||||
safe.
|
||||
|
||||
config/submodule
|
||||
----------------
|
||||
### config/submodule/
|
||||
|
||||
In here you can find submodule configurations for projects. It works for both
|
||||
single- and multi-tree projects. Use the existing examples as reference.
|
||||
|
|
@ -1175,14 +1136,12 @@ because files are not extracted, only placed at their configured destination).
|
|||
The destination path in `module.list` is relative to the location of the main
|
||||
Git repository under which it is placed.
|
||||
|
||||
config/data/PROJECT
|
||||
-------------------
|
||||
### config/data/PROJECT/
|
||||
|
||||
Random configuration data provided on a per-project basis. Complements
|
||||
the `config/PROJECT` directory.
|
||||
|
||||
U-Boot build system
|
||||
-------------------
|
||||
### U-Boot build system
|
||||
|
||||
If you wish to know about U-Boot, refer here:\
|
||||
<https://u-boot.readthedocs.io/en/latest/>
|
||||
|
|
@ -1214,28 +1173,24 @@ configs, but not for adding them. Adding them is to be done manually, based on
|
|||
the above guidance.
|
||||
|
||||
Config files in cbmk root directory
|
||||
===================================
|
||||
-----------------------------------
|
||||
|
||||
projectsite
|
||||
-------------
|
||||
### projectsite
|
||||
|
||||
Domain name linking to the project home page (e.g. canoeboot.org).
|
||||
|
||||
projectname
|
||||
---------------
|
||||
### projectname
|
||||
|
||||
This is a text file, containing a single line that says `canoeboot`. This string
|
||||
is used by the build system, when naming releases alongside the version number.
|
||||
|
||||
version
|
||||
---------------
|
||||
### version
|
||||
|
||||
Updated each time cbmk runs, based on either `git describe` or, on release
|
||||
archives, this file is static and never changes. It says what Canoeboot revision
|
||||
is currently in use (or was in use, if cbmk isn't running).
|
||||
|
||||
versiondate
|
||||
---------------
|
||||
### versiondate
|
||||
|
||||
Updated each time cbmk runs, based on either `git describe` or, on release
|
||||
archives, this file is static and never changes. It says the *time* of
|
||||
|
|
@ -1245,10 +1200,9 @@ At last, you will now learn about the *scripts* (exclusively written as
|
|||
posix shell scripts) that constitute the entire Canoeboot build system, cbmk:
|
||||
|
||||
Scripts in root directory of cbmk
|
||||
=================================
|
||||
---------------------------------
|
||||
|
||||
build
|
||||
---------------
|
||||
### build
|
||||
|
||||
This is the main build script.
|
||||
|
||||
|
|
@ -1271,14 +1225,13 @@ You can also know what build system revision you have by running:
|
|||
This script is the beating heart of Canoeboot. Break it and you break Canoeboot.
|
||||
|
||||
include/
|
||||
===============
|
||||
--------
|
||||
|
||||
This directory contains *helper scripts*, to be included
|
||||
by main scripts using the `.` command (called the `source`
|
||||
command in `bash`, but we rely upon posix `sh` only).
|
||||
|
||||
include/git.sh
|
||||
--------------
|
||||
### include/git.sh
|
||||
|
||||
These functions in here previously existed as independent scripts, but they
|
||||
were unified here, and they are used when you pass the `-f` argument
|
||||
|
|
@ -1288,8 +1241,7 @@ These functions deal with git cloning, submodule updates, revision resets and
|
|||
the application of patch files via `git am`. *Every* git repository downloaded
|
||||
by cbmk is handled by the functions in this file.
|
||||
|
||||
include/lib.sh
|
||||
---------------
|
||||
### include/lib.sh
|
||||
|
||||
Several other parts of cbmk also use this file. It is added to as little as
|
||||
possible, and contains miscallaneous functions that don't belong anywhere else.
|
||||
|
|
@ -1314,8 +1266,7 @@ so if for example you say `mk coreboot`, it would build every coreboot target.
|
|||
This is useful for the release build logic, because now it can much more simply
|
||||
build all of Canoeboot, while still being flexible about it.
|
||||
|
||||
include/rom.sh
|
||||
-----------
|
||||
### include/rom.sh
|
||||
|
||||
This builds coreboot ROM images. Specifically, this contains mkhelper functions.
|
||||
It also builds serprog images, and it could be used to provide functions for
|
||||
|
|
@ -1386,8 +1337,7 @@ CCACHE is automatically used, when building coreboot, but not currently for
|
|||
other projects. This is done by cooking coreboot configs at build time, enabling
|
||||
coreboot's build option for it.
|
||||
|
||||
Serprog images:
|
||||
--------------
|
||||
### Serprog images:
|
||||
|
||||
Build firmware images for serprog-based SPI programmers, where they use an
|
||||
STM32 MCU. It also builds for RP2040-based programmers like Raspberry Pi Pico.
|
||||
|
|
@ -1405,10 +1355,9 @@ include/inject.sh
|
|||
Functions for modifying the intel GbE MAC address on IFD-based Intel systems.
|
||||
|
||||
script/
|
||||
=======
|
||||
-------
|
||||
|
||||
script/trees
|
||||
------------
|
||||
### script/trees
|
||||
|
||||
*This* is the other beating heart of Canoeboot. Used heavily by Canoeboot, this
|
||||
script is what handles defconfig files for SeaBIOS, U-Boot *and* coreboot; it
|
||||
|
|
|
|||
|
|
@ -13,7 +13,7 @@ and several practises may persist in spite of it; nonetheless, this article
|
|||
shall serve as a reference for cbmk development.
|
||||
|
||||
NO BASHISMS
|
||||
===========
|
||||
-----------
|
||||
|
||||
Canoeboot's build system, cbmk (CanoeBoot MaKe) is written entirely in POSIX
|
||||
shell (sh) scripts. This is thanks to the work done by Ferass El Hafidi on
|
||||
|
|
@ -28,15 +28,14 @@ and an even more excellent introduction:
|
|||
(seriously, it's good. Read it!)
|
||||
|
||||
Design
|
||||
======
|
||||
------
|
||||
|
||||
Canoeboot's build system design is very simple: put as much as possible
|
||||
under `config/`, and keep actual logic to a minimum.
|
||||
|
||||
You can read about that design in the [cbmk maintenance manual](index.md).
|
||||
|
||||
No Makefiles
|
||||
------------
|
||||
### No Makefiles
|
||||
|
||||
We have Makefiles in some C programs, under `util/`, and projects that we import
|
||||
may use Makefiles, but cbmk itself does not contain any Makefiles. Instead, we
|
||||
|
|
@ -47,7 +46,7 @@ code is more readable. It's easier to implement a cleaner coding style, which
|
|||
the next sections will cover.
|
||||
|
||||
Coding style
|
||||
============
|
||||
------------
|
||||
|
||||
Read <https://man.openbsd.org/style.9> and go read a few userland program source
|
||||
trees in OpenBSD's main CVS tree. This is the style that inspires the cbmk
|
||||
|
|
@ -61,19 +60,17 @@ Canoeboot scripts, and also C programs like `nvmutil`, are heavily inspired by
|
|||
this style. We insist on its use, because this style is extremely readable and
|
||||
forces you to write better code.
|
||||
|
||||
main on top
|
||||
-----------
|
||||
### main on top
|
||||
|
||||
In every cbmk script, it is our intention that there be a `main()` function.
|
||||
All logic should be inside a function, and `main()` should be the function that
|
||||
executes first; at the bottom of each script, insert this line:
|
||||
|
||||
main $@
|
||||
main "$@"
|
||||
|
||||
This will execute `main()`, passing any arguments (from the user's shell) to it.
|
||||
|
||||
Top-down logic
|
||||
--------------
|
||||
### Top-down logic
|
||||
|
||||
*Every* function called from main should always be *below* the calling function.
|
||||
Therefore, if multiple functions call a given function, that function should be
|
||||
|
|
@ -119,11 +116,10 @@ complicated_function()
|
|||
do_some_complicated_stuff || return 1
|
||||
}
|
||||
|
||||
main $@
|
||||
main "$@"
|
||||
```
|
||||
|
||||
PWD is always root of cbmk
|
||||
--------------------------
|
||||
### PWD is always root of cbmk
|
||||
|
||||
In any script executed by cbmk, under `script/`, the work directory is relative
|
||||
to the main `cbmk` script. In other words, all scripts under `script/` also
|
||||
|
|
@ -132,8 +128,7 @@ assume this.
|
|||
This is actually one of the reasons for that design, as also alluded to in
|
||||
the main [cbmk maintenance manual](index.md).
|
||||
|
||||
main should only be a simple skeleton
|
||||
-------------------------------------
|
||||
### main should only be a simple skeleton
|
||||
|
||||
The `main()` function should not implement much logic itself. Each script in
|
||||
cbmk is its own program. The `main()` function should contain the overall
|
||||
|
|
@ -145,7 +140,7 @@ be below a function that builds ROM images with SeaBIOS payloads inside them,
|
|||
when building coreboot ROM images.
|
||||
|
||||
One task, one script
|
||||
====================
|
||||
--------------------
|
||||
|
||||
Not literally *one task*, but one theme, one *kind* of overall task. For
|
||||
example, `script/build/roms` builds final ROM images of coreboot,
|
||||
|
|
@ -156,7 +151,7 @@ another program that does another thing very well; programs communicate with
|
|||
each other via the universal method, namely text.
|
||||
|
||||
Error handling
|
||||
==============
|
||||
--------------
|
||||
|
||||
Where feasible, a script should do:
|
||||
|
||||
|
|
@ -184,8 +179,7 @@ For example:
|
|||
|
||||
$err "function_name: this shit doesn't work. fix it."
|
||||
|
||||
Do not directly exit
|
||||
--------------------
|
||||
### Do not directly exit
|
||||
|
||||
Please try to use `err` for all error exits.
|
||||
|
||||
|
|
@ -197,8 +191,7 @@ A script should either return zero status, or call `err()`.
|
|||
An individual function may, in some cases, return 1 or 0 itself, which would
|
||||
then be handled accordingly by the calling function.
|
||||
|
||||
How to handle errors
|
||||
--------------------
|
||||
### How to handle errors
|
||||
|
||||
There are some instances where errors should be *ignored*, in which case you
|
||||
might do:
|
||||
|
|
@ -212,7 +205,7 @@ command succeeded, then do this.
|
|||
Never mix `&&` and `||`
|
||||
|
||||
If/else blocks
|
||||
==============
|
||||
--------------
|
||||
|
||||
Keep these simple, and where possible, maybe don't use them at all! For
|
||||
example:
|
||||
|
|
@ -237,8 +230,7 @@ or
|
|||
do something
|
||||
```
|
||||
|
||||
Warnings
|
||||
--------
|
||||
### Warnings
|
||||
|
||||
In C, the `stderr` file is 2 as represented by `int fd` style. In shell scripts,
|
||||
it's the same: 1 for standard output, 2 for errors/warnings. The `err` function
|
||||
|
|
@ -250,25 +242,24 @@ should not yield an exit, you should do something like this:
|
|||
printf "function_name: this is dodgy stuff. fix it maybe?\n" 1>&2
|
||||
|
||||
Avoid passing arguments excessively
|
||||
===================================
|
||||
-----------------------------------
|
||||
|
||||
In functions, use of arguments passed to them can be useful, but in general,
|
||||
they should be avoided; use global variables when feasible.
|
||||
|
||||
Do not exceed 80 characters per line
|
||||
====================================
|
||||
------------------------------------
|
||||
|
||||
See: RFC 3676
|
||||
|
||||
Excessively long code lines are really annoying to read.
|
||||
|
||||
Use tab-based indendation
|
||||
=========================
|
||||
-------------------------
|
||||
|
||||
A new line should begin with tab indentation, in a function.
|
||||
|
||||
Multi-line commands
|
||||
-------------------
|
||||
### Multi-line commands
|
||||
|
||||
Use \\ at the end, as you would, but use *four spaces* to indent on the
|
||||
follow-up line. For example:
|
||||
|
|
@ -282,14 +273,14 @@ function_name()
|
|||
```
|
||||
|
||||
Use printf!
|
||||
===========
|
||||
-----------
|
||||
|
||||
Don't use `echo` unless there's some compelling reason to do so.
|
||||
|
||||
The `printf` functionality is more standard, across various sh implementations.
|
||||
|
||||
env
|
||||
===
|
||||
---
|
||||
|
||||
Don't do:
|
||||
|
||||
|
|
@ -302,7 +293,7 @@ Do:
|
|||
This is more portable, between various Unix systems.
|
||||
|
||||
Be portable!
|
||||
============
|
||||
------------
|
||||
|
||||
In addition to not using bashisms, commands that cbmk uses must also
|
||||
be portable; where possible, third party projects should be tweaked.
|
||||
|
|
@ -317,7 +308,7 @@ Work+testing is sorely needed, in this area. It would be nice if Canoeboot
|
|||
could be built on BSD systems, for example.
|
||||
|
||||
Do as little as possible
|
||||
========================
|
||||
------------------------
|
||||
|
||||
Don't over-engineer anything. Write as simply as you can, to perform a single
|
||||
task. This is basically the same as what has been written elsewhere, but it's
|
||||
|
|
|
|||
|
|
@ -35,7 +35,7 @@ provide testing for the same mainboard if that's what you have. The more the
|
|||
merrier!
|
||||
|
||||
Be Contactable
|
||||
==============
|
||||
--------------
|
||||
|
||||
You should monitor whatever email you provide in your application.
|
||||
There is no specific time-frame for how long it should take after
|
||||
|
|
@ -45,7 +45,7 @@ If you are the *only* maintainer for your board then please take
|
|||
into consideration that your input is especially vital.
|
||||
|
||||
Have External Flashing Equipment
|
||||
================================
|
||||
--------------------------------
|
||||
|
||||
The roms you test will of course be untested.
|
||||
To avoid having a bricked machine, you need to have external flashing
|
||||
|
|
@ -57,7 +57,7 @@ Refer to [Coreboot's documentation](https://doc.coreboot.org/)
|
|||
or ask on IRC if you are unsure.
|
||||
|
||||
Testing Procedure
|
||||
=================
|
||||
-----------------
|
||||
|
||||
You will receive an email when roms are ready for testing.
|
||||
The email will link to an open issue on our [current git hosting platform.](/git.html#cbmk-canoeboot-make)
|
||||
|
|
@ -78,6 +78,6 @@ note: [insert any notes if relevant]
|
|||
|
||||
For example, a board status comment might look like this:
|
||||
|
||||
board: t440p_12mb
|
||||
status: fail
|
||||
note: GRUB throws error 'something_is_b0rked'
|
||||
board: t440p_12mb
|
||||
status: fail
|
||||
note: GRUB throws error 'something_is_b0rked'
|
||||
|
|
|
|||
|
|
@ -32,7 +32,7 @@ Canoeboot намагається зробити Coreboot доступним дл
|
|||
краще!
|
||||
|
||||
Будьте доступними для зв'язку
|
||||
==============
|
||||
--------------------------
|
||||
|
||||
Вам варто відслідковувати будь-яку електронну пошту, що ви вкажете в вашому поданні.
|
||||
Немає конкретного часового проміжку для того, скільки має пройти часу після того, як
|
||||
|
|
@ -42,27 +42,27 @@ Canoeboot намагається зробити Coreboot доступним дл
|
|||
врахуйте, що ваш внесок є особливо значущим.
|
||||
|
||||
Майте обладнання для зовнішньої прошивки
|
||||
================================
|
||||
-------------------------------------
|
||||
|
||||
Образи rom, які ви випробуєте, будуть звісно невипробуваними.
|
||||
Задля уникнення отримання непрацездатної машини, вам потрібно мати обладнання для зовнішньої
|
||||
прошивки в наявності для відновлення вашої плати з поламаного rom.
|
||||
|
||||
В більшості випадків ви можете посилатися на [керівництво SPI.](../install/spi.html)
|
||||
В більшості випадків ви можете посилатися на [керівництво SPI](../install/spi.md).
|
||||
В менш частих випадках -таких як, деякі ARM chromebook- ваша плата може бути прошита іншим чином.
|
||||
Посилайтесь на [документацію Coreboot](https://doc.coreboot.org/)
|
||||
або спитайте в IRC, якщо не впевнені.
|
||||
|
||||
Процедура випробування
|
||||
=================
|
||||
---------------------
|
||||
|
||||
Ви отримаєте лист електронною поштою, коли образи rom будуть готовими для випробування.
|
||||
Лист електронною поштою буде посилатися на відкритий issue на нашій [поточній платформі розміщення git.](/git.html#cbmk-canoeboot-make)
|
||||
Лист електронною поштою буде посилатися на відкритий issue на нашій [поточній платформі розміщення git.](../../git.md#cbmk-canoeboot-make)
|
||||
|
||||
Чи ви отримаєте лист електронною поштою через поштовий домен canoeboot.org,
|
||||
або один з email розробників, вам варто перевірити (для
|
||||
вашої власної безпеки),
|
||||
що завантажені rom підписано з [офіційним ключем.](/download.html#gpg-signing-key)
|
||||
що завантажені rom підписано з [офіційним ключем.](../../download.md#gpg-signing-key)
|
||||
|
||||
Коли ваше випробування закінчено, прокоментуйте в issue, на яке наведено посилання
|
||||
в вашому відправленому листі електронною поштою, таким чином:
|
||||
|
|
@ -75,6 +75,6 @@ note: [вставьте будь-які приміткі, якщо релева
|
|||
|
||||
Наприклад, відгук про статус плати міг би виглядати подібним чином:
|
||||
|
||||
board: t440p_12mb
|
||||
status: fail
|
||||
note: GRUB throws error 'something_is_b0rked'
|
||||
board: t440p_12mb
|
||||
status: fail
|
||||
note: GRUB throws error 'something_is_b0rked'
|
||||
|
|
|
|||
|
|
@ -6,7 +6,7 @@ x-toc-enable: true
|
|||
TODO: this page could do with an update. More info, about more boards
|
||||
|
||||
Introduction
|
||||
============
|
||||
------------
|
||||
|
||||
This document lists product codenames for some hardware.
|
||||
Please note that just because a certain device is listed here does NOT mean
|
||||
|
|
@ -28,7 +28,7 @@ of reliability):
|
|||
they will appear silver.
|
||||
|
||||
List of models and codenames
|
||||
============================
|
||||
----------------------------
|
||||
|
||||
### Codenames
|
||||
|
||||
|
|
@ -101,6 +101,7 @@ under RAM sticks.
|
|||
- Port Replicator II - Seville-lite
|
||||
|
||||
### Miscellaneous
|
||||
|
||||
- [Calistoga](https://ark.intel.com/products/codename/5950/Calistoga):
|
||||
945GM/945PM chipset family name
|
||||
- Napa: calistoga based platform
|
||||
|
|
@ -118,7 +119,8 @@ GM45/GS45/PM45 chipset family name.
|
|||
of it fully describes its operation.
|
||||
|
||||
See also
|
||||
========
|
||||
--------
|
||||
|
||||
- Many more Intel codenames can be found at
|
||||
[Wikipedia](https://en.wikipedia.org/wiki/List_of_Intel_codenames).
|
||||
- For ThinkPads see [Documentation/thinkpad/codenames.csv @ Coreboot]
|
||||
|
|
|
|||
|
|
@ -3,8 +3,8 @@ title: Building Canoeboot for Emulation
|
|||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Introduction
|
||||
============
|
||||
Canoeboot on QEMU
|
||||
-----------------
|
||||
|
||||
Canoeboot supports building for qemu as a target board.
|
||||
The resulting rom can then be tested using qemu.
|
||||
|
|
@ -13,7 +13,7 @@ The qemu board is mostly intended to speed up development by removing the need t
|
|||
Qemu may also be useful for end users who intend to make changes to their Canoeboot rom without having to flash and reboot their machine.
|
||||
|
||||
Building and Testing
|
||||
====================
|
||||
--------------------
|
||||
|
||||
Canoeboot can be built for qemu just like any other board.
|
||||
|
||||
|
|
@ -57,7 +57,7 @@ qemu-system-aarch64 \
|
|||
```
|
||||
|
||||
Use Cases
|
||||
=========
|
||||
---------
|
||||
|
||||
While development is the primary motivation for qemu support, the board makes it easy to test minor changes to release roms.
|
||||
For example one can use *cbfstool* from coreboot to edit the background image in a Canoeboot rom as follows:
|
||||
|
|
|
|||
|
|
@ -11,7 +11,7 @@ You should assume that these instructions no longer work. Otherwise, if you
|
|||
wish to test them and send changes, patches are very much welcome!
|
||||
|
||||
High Pitched Whining Noise on Idle in Arch-based distros
|
||||
==============================================================
|
||||
--------------------------------------------------------
|
||||
|
||||
**NOTE: VERY OLD advice (years old), it may not be relevant for modern Arch.**
|
||||
|
||||
|
|
@ -69,7 +69,6 @@ using [this guide](../linux/grub_cbfs.md).
|
|||
X60/T60: Serial port - how to use (for dock owners)
|
||||
|
||||
[Note: using a grsec enabled kernel will disable the powertop function. ](https://en.wikibooks.org/wiki/Grsecurity/Appendix/Grsecurity_and_PaX_Configuration_Options)
|
||||
===================================================
|
||||
|
||||
For the Thinkpad X60 you can use the "UltraBase X6" dock (for the
|
||||
X60 Tablet it is called X6 Tablet UltraBase). For the ThinkPad T60, you
|
||||
|
|
@ -103,8 +102,8 @@ Note: part of the tutorial above requires changing your grub.cfg. Just
|
|||
change the `linux` line to add instructions for enabling getty. See
|
||||
[../linux/grub\_cbfs.md](../linux/grub_cbfs.md).
|
||||
|
||||
Finetune backlight control on intel gpu's
|
||||
=========================================
|
||||
Finetune backlight control on intel GPUs
|
||||
----------------------------------------
|
||||
|
||||
Sometimes the backlight control value (BLC\_PWM\_CTL) set by Canoeboot
|
||||
is not ideal. The result is either flicker, which could cause nausea or
|
||||
|
|
@ -196,7 +195,7 @@ on page 94. More research needs to be done on this target so proceed
|
|||
with care.
|
||||
|
||||
Power Management Beeps on Thinkpads
|
||||
===================================
|
||||
-----------------------------------
|
||||
|
||||
When disconnecting or connecting the charger, a beep occurs. When the
|
||||
battery goes to a critically low charge level, a beep occurs. Nvramtool
|
||||
|
|
@ -231,7 +230,7 @@ Finally, you need to flash the rom with this new image. See here
|
|||
for a detailed explanation.
|
||||
|
||||
Get EDID: Find out the name (model) of your LCD panel
|
||||
=====================================================
|
||||
-----------------------------------------------------
|
||||
|
||||
Get the panel name:
|
||||
|
||||
|
|
@ -254,7 +253,7 @@ removing the LCD panel is an option. Usually, there will be information
|
|||
printed on the back.
|
||||
|
||||
e1000e driver trouble shooting (Intel NICs)
|
||||
===========================================
|
||||
-------------------------------------------
|
||||
|
||||
Example error, ¿may happen on weird and complex routing schemes(citation
|
||||
needed for cause):
|
||||
|
|
|
|||
|
|
@ -6,30 +6,20 @@ x-toc-enable: true
|
|||
**NOTE: This documentation refers only to ARM64. For AMD64/i386 (Intel/AMD)
|
||||
U-Boot setups, please read [uboot-x86.md](uboot-x86.md).**
|
||||
|
||||
Canoeboot has experimental support for using U-Boot as a coreboot
|
||||
payload since the the project was launched, and on x86 since late 2024.
|
||||
|
||||
U-Boot integration in Canoeboot is currently at a proof-of-concept
|
||||
stage, with most boards completely untested and most likely not working.
|
||||
ROM images for them are mostly intended for further testing and
|
||||
development. If you have one of these machines and want to help fix
|
||||
things, you can ping `alpernebbi` on Libera IRC, who ported these boards
|
||||
to Canoeboot.
|
||||
|
||||
Make sure you have the latest `cbmk` from the Git repository,
|
||||
and the build dependencies are installed like so, from `cbmk/` as root:
|
||||
|
||||
./mk dependencies debian
|
||||
|
||||
This installs everything needed for `./mk -b coreboot`, and part of the
|
||||
build process makes use of coreboot's own cross-compile toolchain.
|
||||
Emulation
|
||||
---------
|
||||
|
||||
[QEMU x86/ARM64 virtual machines](../misc/emulation.md) are also
|
||||
supported, which should be easy targets to start tinkering on if you
|
||||
want to contribute.
|
||||
|
||||
Usage
|
||||
=====
|
||||
-----
|
||||
|
||||
When your board is powered on, U-Boot will ideally turn on the display
|
||||
and start printing console messages there. After a countdown of a few
|
||||
|
|
@ -63,7 +53,7 @@ table, unexpected parts of the SPI ROM image, or do something else
|
|||
entirely.
|
||||
|
||||
Known issues
|
||||
============
|
||||
------------
|
||||
|
||||
U-Boot integration in Canoeboot is incomplete. Here is a list of known
|
||||
issues that affect all boards:
|
||||
|
|
@ -81,7 +71,8 @@ issues that affect all boards:
|
|||
- UEFI support is incomplete
|
||||
|
||||
See also
|
||||
========
|
||||
--------
|
||||
|
||||
- [U-Boot documentation](https://u-boot.readthedocs.io/en/latest/)
|
||||
- [U-Boot documentation (unmigrated files)](https://source.denx.de/u-boot/u-boot/-/tree/master/doc)
|
||||
- [U-Boot and generic distro boot](https://marcin.juszkiewicz.com.pl/2021/03/14/u-boot-and-generic-distro-boot/)
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ x-toc-enable: true
|
|||
...
|
||||
|
||||
Background
|
||||
==========
|
||||
----------
|
||||
|
||||
The following process should theoretically be applicable to other U-Boot devices and Linux distributions, but the focus here is specifically on ArchLinuxARM.
|
||||
|
||||
|
|
@ -16,7 +16,7 @@ And the the instructions from the ArchLinuxARM wiki [here](https://archlinuxarm.
|
|||
The purpose of this guide is to instruct users on how to install an ArchLinuxARM on an external disk that will boot on a gru_bob chromebook, and optionally on the internal eMMC. Many concepts covered in this guide may be familiar to prospective and veteran Canoeboot users, with the scope being comprehensive.
|
||||
|
||||
Boot Method
|
||||
===========
|
||||
-----------
|
||||
|
||||
There are (at least) three methods that can be used to boot into a Linux distribution from u-boot:
|
||||
1) EFI - common, modern boot method for amd64 architecture machines. This is not distribution-specific, so if you intend to make a portable drive that is compatible across multiple systems, you may have a use case.
|
||||
|
|
@ -34,7 +34,7 @@ For more information about what actually goes into a boot.scr script, check [thi
|
|||
Since extlinux.conf is supported by multiple bootloaders, making your system more portable, is natively supported by u-boot, and requires no binary blobs or extra software, it seems to be the best choice for a chromebook.
|
||||
|
||||
Creating extlinux.conf
|
||||
======================
|
||||
----------------------
|
||||
|
||||
Here is an example template of extlinux.conf, [similar examples are found in the u-boot docs](https://u-boot.readthedocs.io/en/latest/develop/distro.html):
|
||||
|
||||
|
|
@ -44,7 +44,6 @@ menu title Libre-U-Boot menu
|
|||
prompt 0
|
||||
timeout 50
|
||||
|
||||
|
||||
label arch
|
||||
menu label Arch Linux ARM
|
||||
linux /Image
|
||||
|
|
@ -61,7 +60,7 @@ label archfallback
|
|||
```
|
||||
|
||||
Formatting and Partitioning Your External Media
|
||||
===============================================
|
||||
-----------------------------------------------
|
||||
|
||||
Now it's time partition the boot disk. During testing, a microSD card was used in the microSD card slot of the gru-bob chromebook.
|
||||
The Canoeboot configuration will boot the microSD card above the onboard eMMC if both are present and bootable. This is useful because it means no knowledge or use of the u-boot console is required.
|
||||
|
|
@ -73,10 +72,12 @@ Find your device with my favourite command, `lsblk` and open it with `fdisk`
|
|||
```
|
||||
fdisk /dev/sdX
|
||||
```
|
||||
|
||||
For users creating a bootable SD card, your device may show up as `/dev/mmcblkX` - if this is the case, make sure to change the commands in this guide to
|
||||
contain that path instead of `/dev/sdX`.
|
||||
|
||||
In the fdisk tui, create two partitions on a Master Boot Record:
|
||||
|
||||
- create a new MBR label
|
||||
- create boot partition of approx. 200MB or greater
|
||||
- set bootable flag on this partition
|
||||
|
|
@ -86,27 +87,32 @@ In the fdisk tui, create two partitions on a Master Boot Record:
|
|||
You will find the appropriate options by typing `m` when using the fdisk tui on Linux distros.
|
||||
|
||||
Now make the filesystems:
|
||||
|
||||
```
|
||||
mkfs.vfat /dev/sdX1
|
||||
mkfs.ext4 /dev/sdX2
|
||||
|
||||
```
|
||||
|
||||
It's now time to get the PARTUUID of `/dev/sdX2`:
|
||||
|
||||
```
|
||||
sudo blkid | grep "/dev/sdX2"
|
||||
```
|
||||
|
||||
make sure to note down the PARTUUID of your second partition; not your boot partition.
|
||||
paste this into your extlinux.conf file in the `append` section, e.g.:
|
||||
|
||||
```
|
||||
append console=ttyS0,115200 console=tty1 rw root=PARTUUID=fc0d0284-ca84-4194-bf8a-4b9da8d66908
|
||||
```
|
||||
|
||||
in the template provided above, replace `$PARTUUID` with your own. It's possible to specify root in other ways - check the u-boot docs for more examples.
|
||||
|
||||
Boot-Disk Creation
|
||||
==================
|
||||
------------------
|
||||
|
||||
Now that we've got an extlinux.conf file, copy it to your /tmp directory, and we'll begin.
|
||||
|
||||
```
|
||||
cd /tmp
|
||||
curl -LO http://os.archlinuxarm.org/os/ArchLinuxARM-aarch64-latest.tar.gz
|
||||
|
|
@ -123,6 +129,7 @@ sync
|
|||
umount boot
|
||||
umount root
|
||||
```
|
||||
|
||||
Note the use of ArchLinuxARM-aarch64-latest.tar.gz and not ArchLinuxARM-gru-latest.tar.gz
|
||||
|
||||
The current gru build only supports a depthcharge payload and, of course, we're not using depthcharge are we?
|
||||
|
|
@ -133,7 +140,7 @@ Extensive testing with ArchLinuxARM-latest release, showed that booting the fall
|
|||
If you create an extlinux.conf file with paths to both images - like in the template above - you can select either by number at boot.
|
||||
|
||||
Going Live - Necessary Tweaks
|
||||
=============================
|
||||
-----------------------------
|
||||
|
||||
Once you're at the login prompt, the fun isn't over! Login & password for root are both `root` by default.
|
||||
Most Arch users will likely try to update their system now - don't update just yet.
|
||||
|
|
@ -142,10 +149,12 @@ Run `lsblk` and you'll see that the boot partition is not mounted by default.
|
|||
Updating with `pacman -Syu` at this stage will cause driver problems if you update without your boot partition mounted, likely meaning you cannot connect to the internet with a USB peripheral.
|
||||
|
||||
To prevent this becoming a problem:
|
||||
|
||||
```
|
||||
mkdir /boot
|
||||
mount /dev/sdX1 /boot
|
||||
```
|
||||
|
||||
With that out of the way, yes, you may now update.
|
||||
It's worth creating a basic filesystem table to automate mounting at boot - it's blank by default so here's another template:
|
||||
|
||||
|
|
@ -160,18 +169,22 @@ UUID=$UUID1 / ext4 rw,relatime 0 1
|
|||
# /dev/mmcblk1p1 boot
|
||||
UUID=$UUID0 /boot vfat rw,relatime 0 2
|
||||
```
|
||||
|
||||
It should go without saying that you'll replace `$UUID0` and `UUID1` with your boot and root filesystem UUID.
|
||||
To get the right information in there:
|
||||
|
||||
```
|
||||
lsblk -o NAME,UUID,FSTYPE,SIZE
|
||||
```
|
||||
|
||||
`NAME` and `SIZE` are not necessary, but they will help you tell which partition is which.
|
||||
|
||||
Final Steps
|
||||
===========
|
||||
-----------
|
||||
|
||||
At this stage, you now have a fully functional ArchLinuxARM system on an external disk, and are ready to configure your system.
|
||||
If you intend to install onto the eMMC module, you can make your changes permanent with:
|
||||
|
||||
```
|
||||
dd if=/dev/mmcblk0 of=/dev/mmcblk1 bs=4M status=progress
|
||||
```
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ x-toc-enable: true
|
|||
...
|
||||
|
||||
System Configuration
|
||||
====================
|
||||
--------------------
|
||||
|
||||
Hardware: Samsung Chromebook Plus XE513C24 (gru\_kevin)
|
||||
|
||||
|
|
@ -15,7 +15,7 @@ Operating System: Debian Bookworm RC2
|
|||
[https://wiki.debian.org/Firmware](https://wiki.debian.org/Firmware)
|
||||
|
||||
Install Media Preparation
|
||||
=========================
|
||||
-------------------------
|
||||
|
||||
Follow the Debian installation instructions in the link below:
|
||||
|
||||
|
|
@ -26,16 +26,17 @@ page and I selected the DVD image to have all the packages available when
|
|||
offline (3.7 gigabyte iso). See the notes below about alternately using the
|
||||
netinst version.
|
||||
|
||||
[https://cdimage.debian.org/cdimage/bookworm_di_rc2/arm64/iso-dvd/](https://cdimage.debian.org/cdimage/bookworm_di_rc2/arm64/iso-dvd/)
|
||||
[https://cdimage.debian.org/cdimage/bookworm\_di\_rc2/arm64/iso-dvd/](https://cdimage.debian.org/cdimage/bookworm_di_rc2/arm64/iso-dvd/)
|
||||
|
||||
Write the iso file to a micro sdcard. Replace `sdcard_device` below
|
||||
with the appropriate device path on your system.
|
||||
|
||||
```
|
||||
# dd if=debian-bookworm-DI-rc2-arm64-DVD-1.img of=/dev/sdcard_device bs=1M status=progress; sync
|
||||
```
|
||||
|
||||
Installation
|
||||
============
|
||||
------------
|
||||
|
||||
1. Insert the micro sdcard into the slot on the Chromebook.
|
||||
2. Power on the Chromebook.
|
||||
|
|
@ -149,7 +150,7 @@ internal emmc.
|
|||
|
||||
|
||||
System Functionality
|
||||
====================
|
||||
--------------------
|
||||
|
||||
Things that work:
|
||||
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ x-toc-enable: true
|
|||
...
|
||||
|
||||
System Configuration
|
||||
====================
|
||||
--------------------
|
||||
|
||||
Hardware: Samsung Chromebook Plus XE513C24 (gru\_kevin)
|
||||
|
||||
|
|
@ -13,7 +13,7 @@ Tested on [Libreboot 20230423](https://libreboot.org/news/libreboot20230423.html
|
|||
Operating System: OpenBSD 7.3
|
||||
|
||||
Install Media Preparation
|
||||
=========================
|
||||
-------------------------
|
||||
|
||||
Follow the OpenBSD arm64 installation instructions in the link below:
|
||||
|
||||
|
|
@ -26,7 +26,7 @@ with the appropriate device path on your system.
|
|||
```
|
||||
|
||||
Installation Attempt
|
||||
====================
|
||||
--------------------
|
||||
|
||||
1. Insert the micro sdcard into the slot on the Chromebook.
|
||||
2. Power on the Chromebook.
|
||||
|
|
|
|||
|
|
@ -3,8 +3,8 @@ title: U-Boot payload (x86 specific)
|
|||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Introduction
|
||||
============
|
||||
U-Boot UEFI on x86
|
||||
------------------
|
||||
|
||||
<img tabindex=1 class="r" src="https://av.vimuser.org/x200-uboot.jpg" /><span class="f"><img src="https://av.vimuser.org/x200-uboot.jpg" /></span>
|
||||
|
||||
|
|
@ -25,8 +25,7 @@ payload. It has several boot methods but the most interesting (in an x86
|
|||
context) is UEFI. U-Boot provides a very sensible UEFI implementation that can
|
||||
reliably boot many Linux and BSD systems.
|
||||
|
||||
Availability
|
||||
------------
|
||||
### Availability
|
||||
|
||||
<img tabindex=1 class="r" src="https://av.vimuser.org/uboot-canoe.png" /><span class="f"><img src="https://av.vimuser.org/uboot-canoe.png" /></span>
|
||||
|
||||
|
|
@ -52,8 +51,7 @@ Here is an example of what it looks like on the boot menu:
|
|||
|
||||
<https://mas.to/@libreleah/113596262378713418>
|
||||
|
||||
Errors
|
||||
------
|
||||
### Errors
|
||||
|
||||
If you see error `-25` in the bootflow menu, it's because there's nothing
|
||||
installed that i t can use e.g. EFI bootloader such as GRUB.
|
||||
|
|
@ -62,8 +60,7 @@ If you see error `-2` it's likely that you have tried to boot a USB drive
|
|||
automatically; sometimes you have to do it manually (see the section below
|
||||
about using the bootflow command manually, via `bootflow select`).
|
||||
|
||||
Boot Linux or BSD installer (USB)
|
||||
---------------------------
|
||||
### Boot Linux/BSD installer (USB)
|
||||
|
||||
Just stick your formatted USB stick in. U-Boot should detect it. Sometimes some
|
||||
USB flash drives are broken, because many of them violate specifications and
|
||||
|
|
@ -84,8 +81,7 @@ After selecting the device, you can do:
|
|||
|
||||
bootflow boot
|
||||
|
||||
Booting installed system
|
||||
------------------------
|
||||
### Booting installed system
|
||||
|
||||
It should just work. If all is well, it'll show the bootflow menu. Simply
|
||||
select your device. If you see error, perhaps try:
|
||||
|
|
@ -93,10 +89,9 @@ select your device. If you see error, perhaps try:
|
|||
bootefi bootmgr
|
||||
|
||||
Tested operating systems
|
||||
========================
|
||||
------------------------
|
||||
|
||||
Linux/BSD
|
||||
---------
|
||||
### Linux/BSD
|
||||
|
||||
Arch Linux, Debian Linux and OpenBSD have been tested.
|
||||
|
||||
|
|
@ -110,8 +105,7 @@ bootloader in the installed system).
|
|||
EFI-based GRUB menus like in the Debian installer seemed to work just fine,
|
||||
that is: setups that use the EFI framebuffer instead of a text console.
|
||||
|
||||
Windows
|
||||
-------
|
||||
### Windows
|
||||
|
||||
Windows was tested, and doesn't work yet. Simon Glass maintains the x86
|
||||
coreboot payload, and has informed me that he still has some work to do
|
||||
|
|
@ -120,7 +114,7 @@ there.
|
|||
Obviously using Windows would be extremely unGNU, so we advise against it.
|
||||
|
||||
SecureBoot
|
||||
==========
|
||||
----------
|
||||
|
||||
Supported by U-Boot, though U-Boot does not currently have a robust way of
|
||||
storing EFI variables, and Canoeboot disables SecureBoot by default. However,
|
||||
|
|
@ -135,7 +129,7 @@ sense to Canoeboot's GRUB hardening setup, though the latter is more flexible,
|
|||
albeit not widely used by the mainstream, but it does work (I use it myself!).
|
||||
|
||||
ThinkPad X60/T60
|
||||
================
|
||||
----------------
|
||||
|
||||
The 32-bit U-Boot payload is only useful for 32-bit setups, and 32-bit UEFI
|
||||
isn't really that common on x86; the 64-bit U-Boot payload is much more useful,
|
||||
|
|
@ -172,7 +166,7 @@ interesting in the future, as more distros stop supporting BIOS-based methods,
|
|||
or where the latter may become untested in the future.
|
||||
|
||||
Bugs
|
||||
====
|
||||
----
|
||||
|
||||
Limited testing, at least as of 5 December 2024, but some issues that appeared
|
||||
included:
|
||||
|
|
@ -192,7 +186,7 @@ but some don't very well; the GM45 machines work well, e.g. a ThinkPad X200 was
|
|||
tested.
|
||||
|
||||
Mitigating instability
|
||||
=======================
|
||||
----------------------
|
||||
|
||||
U-Boot is not a primary payload on any board where it's enabled. It's instead
|
||||
chainloaded from SeaBIOS on 64-bit x86, and from GRUB on 32-bit x86. You select
|
||||
|
|
|
|||
|
|
@ -1,5 +1,5 @@
|
|||
---
|
||||
title: Downloads
|
||||
title: Download Canoeboot
|
||||
x-toc-enable: true
|
||||
...
|
||||
|
||||
|
|
|
|||
172
site/faq.md
172
site/faq.md
|
|
@ -6,7 +6,7 @@ x-toc-enable: true
|
|||
AKA Frequently Questioned Answers
|
||||
|
||||
Disable security before flashing
|
||||
================================
|
||||
--------------------------------
|
||||
|
||||
Before internal flashing, you must first disable `/dev/mem` protections. Make
|
||||
sure to re-enable them after you're finished.
|
||||
|
|
@ -14,20 +14,17 @@ sure to re-enable them after you're finished.
|
|||
See: [Disabling /dev/mem protection](docs/install/devmem.md)
|
||||
|
||||
Important issues
|
||||
================
|
||||
----------------
|
||||
|
||||
How to compile Canoeboot from source
|
||||
------------------------------------
|
||||
### How to compile Canoeboot from source
|
||||
|
||||
Refer to the [cbmk build instructions](docs/build/).
|
||||
|
||||
How does the build system work?
|
||||
-------------------------------
|
||||
### How does the build system work?
|
||||
|
||||
Refer to the [cbmk maintenance manual](docs/maintain/).
|
||||
|
||||
Do not use CH341A!
|
||||
------------------
|
||||
### Do not use CH341A!
|
||||
|
||||
This SPI flasher will damage your chip, and the mainboard that it is connected
|
||||
to.
|
||||
|
|
@ -35,8 +32,7 @@ to.
|
|||
Read the notes about CH341A on [docs/install/spi.md](docs/install/spi.md) to
|
||||
learn more.
|
||||
|
||||
How Can I Help
|
||||
--------------
|
||||
### How Can I Help
|
||||
|
||||
If you have a board supported in Canoeboot then please consider becoming a
|
||||
tester.
|
||||
|
|
@ -44,8 +40,7 @@ Testing involves minimal effort and really helps out the project.
|
|||
See the [board maintainers documentation](/docs/maintain/testing.md)
|
||||
if you are interested in testing roms before they are released.
|
||||
|
||||
Uneven backlight on GM45 ThinkPads
|
||||
----------------------------------
|
||||
### Uneven backlight on GM45 ThinkPads
|
||||
|
||||
We don't know how to detect the correct PWM value to use in
|
||||
coreboot, so we just use the default one in coreboot which has
|
||||
|
|
@ -54,8 +49,7 @@ this issue on some CCFL panels, but not LED panels.
|
|||
You can work around this in your distribution, by following the notes at
|
||||
[docs: backlight control](../docs/misc/#finetune-backlight-control-on-intel-gpus).
|
||||
|
||||
Dead ethernet port on X200/T400/X60/T60
|
||||
---------------------------------------
|
||||
### GM45 thinkpad ethernet port doesn't autoconnect
|
||||
|
||||
This was observed on some systems using network-manager. This happens
|
||||
both on the original BIOS and in Canoeboot. It's a quirk in the
|
||||
|
|
@ -71,8 +65,7 @@ On systemd-based distros, you might try:
|
|||
(the service name might be different for you, depending on your
|
||||
configuration)
|
||||
|
||||
KCMA-D8/KGPE-D16: doesn't boot with PIKE2008
|
||||
---------------------------------------
|
||||
### PIKE2008 module hangs KGPE-D16 / KCMA-D8
|
||||
|
||||
Loading the option ROM from the PIKE2008 module on either ASUS KCMA-D8
|
||||
or KGPE-D16 causes the system to hang at boot. It's possible to use
|
||||
|
|
@ -81,8 +74,7 @@ or to boot (with SeaGRUB and/or SeaBIOS) from regular SATA and then use
|
|||
it in Linux. The Linux kernel is capable of using the PIKE2008
|
||||
module without loading the option ROM.
|
||||
|
||||
How to save kernel panic logs on thinkpad laptops?
|
||||
--------------------------------------------------
|
||||
### How to save kernel panic logs on thinkpad laptops?
|
||||
|
||||
The easiest method of doing so is by using the kernel's netconsole
|
||||
and reproducing the panic. Netconsole requires two machines, the one that is
|
||||
|
|
@ -147,23 +139,21 @@ the target (`target$`):
|
|||
7. Try to reproduce the kernel panic.
|
||||
|
||||
Hardware compatibility
|
||||
======================
|
||||
----------------------
|
||||
|
||||
What systems are compatible with Canoeboot?
|
||||
-----------------------------------------------------------------------------------
|
||||
### What systems are compatible with Canoeboot?
|
||||
|
||||
Any system can easily be added, so *compatibility* merely refers to whatever
|
||||
boards are integrated in the `cbmk` build system, which Canoeboot uses.
|
||||
|
||||
The [installation page](docs/install/) lists compatible machines.
|
||||
|
||||
Freedom pitfalls with modern Intel hardware {#intel}
|
||||
----------------------------------------------------
|
||||
### Freedom pitfalls with modern Intel hardware {#intel}
|
||||
|
||||
Coreboot is nominally Free Software, but requires binary blobs on most x86
|
||||
targets that it supports, on both Intel and AMD.
|
||||
|
||||
### Intel Management Engine (ME) {#intelme}
|
||||
#### Intel Management Engine (ME) {#intelme}
|
||||
|
||||
NOTE: The information below is slightly out of date. Nowadays, Intel ME does
|
||||
not run on an ARC coprocessor, but instead runs on a modified Intel 486 based
|
||||
|
|
@ -328,7 +318,11 @@ The book ***[Platform Embedded Security Technology
|
|||
Revealed](https://www.apress.com/9781430265719)*** describes in great
|
||||
detail the ME's hardware architecture and firmware application modules.
|
||||
|
||||
### Firmware Support Package (FSP) {#fsp}
|
||||
If you're stuck with the ME (non-canoeboot system), you might find this
|
||||
interesting:
|
||||
<https://hardenedlinux.github.io/firmware/2016/11/17/neutralize_ME_firmware_on_sandybridge_and_ivybridge.html>
|
||||
|
||||
#### Firmware Support Package (FSP) {#fsp}
|
||||
|
||||
On all recent Intel systems, coreboot support has revolved around
|
||||
integrating a blob (for each system) called the *FSP* (firmware support
|
||||
|
|
@ -342,7 +336,7 @@ Since the FSP is responsible for the early hardware initialization, that
|
|||
means it also handles SMM (System Management Mode). This is a special
|
||||
mode that operates below the operating system level.
|
||||
|
||||
### CPU microcode updates {#microcode}
|
||||
#### CPU microcode updates {#microcode}
|
||||
|
||||
The microcode configures logic gates in your CPU, to implement an instruction
|
||||
set architecture. Your CPU will already contain them, but it also supplies a
|
||||
|
|
@ -365,8 +359,7 @@ The git repository for that project is here:
|
|||
Both the video and the repository give some further insight about CPU
|
||||
microcode. The way it works on AMD will be very similar to Intel.
|
||||
|
||||
Freedom pitfalls to consider on AMD hardware {#amd}
|
||||
----------------------------------------------------------------------------
|
||||
### Freedom pitfalls to consider on AMD hardware {#amd}
|
||||
|
||||
NOTE: Nowadays there's openSIL <https://github.com/openSIL/openSIL> - it's
|
||||
AMD's attempt to provide some source code again, that projects like coreboot
|
||||
|
|
@ -376,7 +369,7 @@ be "neutered" (nothing like `me_cleaner`, or *psp\_cleaner*) exists yet.
|
|||
AMD has more or less the same problem as Intel, when it comes to software
|
||||
freedom.
|
||||
|
||||
### AMD Platform Security Processor (PSP)
|
||||
#### AMD Platform Security Processor (PSP)
|
||||
|
||||
This is basically AMD's own version of the [Intel Management
|
||||
Engine](#intelme). It has all of the same basic security and freedom
|
||||
|
|
@ -419,13 +412,13 @@ anecdotal reports indicate that AMD's boot guard counterpart will be
|
|||
used on most OEM hardware, disabled only on so-called "enthusiast"
|
||||
CPUs.
|
||||
|
||||
### AMD IMC firmware
|
||||
#### AMD IMC firmware
|
||||
|
||||
Read <https://www.coreboot.org/AMD_IMC>.
|
||||
|
||||
NOTE: This section is oudated, and it is in need of cleanup.
|
||||
|
||||
### AMD SMU firmware
|
||||
#### AMD SMU firmware
|
||||
|
||||
NOTE: This section may be outdated, and it is in need of cleanup.
|
||||
|
||||
|
|
@ -443,7 +436,7 @@ and based on this work, Damien Zammit (another coreboot hacker)
|
|||
firmware, but on the relevant system (ASUS F2A85-M) there were still
|
||||
other such files present (Video BIOS, and others).
|
||||
|
||||
### AMD AGESA firmware
|
||||
#### AMD AGESA firmware
|
||||
|
||||
NOTE: More needs to be written about this, to reflect the current reality.
|
||||
The situation with AMD has evolved in recent years. The information on this FAQ
|
||||
|
|
@ -455,29 +448,26 @@ project, releasing this as source code under a free license. In 2014,
|
|||
they stopped releasing source code and started releasing AGESA as binary
|
||||
blobs instead. This makes AGESA now equivalent to [Intel FSP](#fsp).
|
||||
|
||||
### AMD CPU microcode updates
|
||||
#### AMD CPU microcode updates
|
||||
|
||||
Read the Intel section
|
||||
practically the same, though it was found with much later hardware in
|
||||
AMD that you could run without microcode updates. It's unknown whether
|
||||
the updates are needed on all AMD boards (depends on CPU).
|
||||
|
||||
Hi, I have <insert random system here>, is it supported?
|
||||
--------------------------------------------------------------------------------------------------------
|
||||
### Hi, I have <insert random system here>, is it supported?
|
||||
|
||||
If coreboot lacks support for your hardware, you must add support for it.
|
||||
Please consult the coreboot project for guidance.
|
||||
|
||||
General questions
|
||||
=================
|
||||
-----------------
|
||||
|
||||
How do I install Canoeboot?
|
||||
-------------------------------------------------------
|
||||
### How do I install Canoeboot?
|
||||
|
||||
See [installation guide](docs/install/)
|
||||
|
||||
How do I program an SPI flash chip?
|
||||
---------------------------------------------------------------------------------
|
||||
### How do I program an SPI flash chip?
|
||||
|
||||
Refer to:\
|
||||
[Externally rewrite 25xx NOR flash via SPI protocol](docs/install/spi.md)
|
||||
|
|
@ -485,8 +475,7 @@ Refer to:\
|
|||
It's possible to use a 16-pin SOIC test clip on an 8-pin SOIC chip, if you
|
||||
align the pins properly. The connection is generally more sturdy.
|
||||
|
||||
How do I write-protect the flash chip?
|
||||
----------------------------------------------------------------------------
|
||||
### How do I write-protect the flash chip?
|
||||
|
||||
By default, there is no write-protection on a Canoeboot system. This is
|
||||
for usability reasons, because most people do not have easy access to an
|
||||
|
|
@ -506,8 +495,7 @@ welcome to submit patches adding these instructions.
|
|||
TODO: Document PRx based flash protection on Intel platforms, and investigate
|
||||
other methods on AMD systems.
|
||||
|
||||
How do I change the BIOS settings?
|
||||
------------------------------------------------------------------------
|
||||
### How do I change the BIOS settings?
|
||||
|
||||
Most Canoeboot setups actually use the [GRUB
|
||||
payload](http://www.coreboot.org/GRUB2). More information about payloads
|
||||
|
|
@ -541,8 +529,7 @@ To get a full list of available options, do this:
|
|||
This will change the default inside that ROM image, and then you can
|
||||
re-flash it.
|
||||
|
||||
How do I pad a ROM before flashing?
|
||||
--------------------------------------
|
||||
### How do I pad a ROM before flashing?
|
||||
|
||||
It is advisable to simply use a larger ROM image. This section was written
|
||||
mostly for ASUS KCMA-D8 and KGPE-D16 mainboards, where previously we only
|
||||
|
|
@ -581,8 +568,7 @@ padded 16MiB image do the following:
|
|||
|
||||
With padding removed cbfstool will be able to operate on the image as usual.
|
||||
|
||||
Do I need a bootloader in my distro?
|
||||
---------------------------------------------------------------------------------------------------
|
||||
### Do I need to install a bootloader when installing a distribution?
|
||||
|
||||
Most Canoeboot setups integrate the GRUB bootloader already, as a
|
||||
*[payload](http://www.coreboot.org/Payloads)*. This means that the GRUB
|
||||
|
|
@ -600,8 +586,7 @@ Nowadays, other payloads are also provided. If you're using the SeaBIOS payload,
|
|||
then the normal MBR bootsector is used on your HDD or SSD, like you would
|
||||
expect. So the above paragraphs only apply to the GRUB payload.
|
||||
|
||||
Do I need to re-flash when I re-install a distribution?
|
||||
-------------------------------------------------------------------------------------------
|
||||
### Do I need to re-flash when I re-install a distribution?
|
||||
|
||||
Not anymore. Recent versions of Canoeboot (using the GRUB payload) will
|
||||
automatically switch to a GRUB configuration on the HDD or SSD, if it
|
||||
|
|
@ -613,14 +598,38 @@ more information, see
|
|||
If you're using the SeaBIOS payload, it's even easier. It works just like you
|
||||
would expect. SeaBIOS implements a normal x86 BIOS interface.
|
||||
|
||||
What does a flash chip look like?
|
||||
-----------------------------------------------------------------
|
||||
### What does a flash chip look like?
|
||||
|
||||
You can find photos of various chip types on the following page:\
|
||||
[External 25xx NOR flashing guide](docs/install/spi.md)
|
||||
|
||||
### tlp
|
||||
|
||||
You can install the `tlp` package and start that service. For example, on
|
||||
Debian:
|
||||
|
||||
```
|
||||
apt-get install tlp tlp-rdw
|
||||
systemctl enable tlp
|
||||
systemctl start tlp
|
||||
```
|
||||
|
||||
Now read the manual:
|
||||
|
||||
```
|
||||
man tlp-stat
|
||||
```
|
||||
|
||||
As root, you can do:
|
||||
|
||||
```
|
||||
tlp-stat -b
|
||||
```
|
||||
|
||||
This will provide information about the battery.
|
||||
|
||||
What other firmware exists outside of Canoeboot?
|
||||
==================================================
|
||||
------------------------------------------------
|
||||
|
||||
### External GPUs
|
||||
|
||||
|
|
@ -830,10 +839,9 @@ Use of ethernet or wifi is recommended, as opposed to mobile networks,
|
|||
as these are generally much safer.
|
||||
|
||||
Operating Systems
|
||||
=================
|
||||
-----------------
|
||||
|
||||
Can I use Linux?
|
||||
--------------------------------------------------
|
||||
### Can I use Linux?
|
||||
|
||||
Absolutely! It is well-tested in Canoeboot, and highly recommended. See
|
||||
[installing Linux](../docs/linux/grub_boot_installer.md) and
|
||||
|
|
@ -842,15 +850,13 @@ Absolutely! It is well-tested in Canoeboot, and highly recommended. See
|
|||
Any recent distribution should work, as long as it uses KMS (kernel mode
|
||||
setting) for the graphics.
|
||||
|
||||
Fedora won't boot? (maybe Redhat/CentOS)
|
||||
-----------------------------------------------------------
|
||||
### Fedora won't boot? (may also be applicable to Redhat/CentOS)
|
||||
|
||||
On Fedora, by default the grub.cfg tries to boot linux in 16-bit mode. You
|
||||
just have to modify Fedora's GRUB configuration.
|
||||
Refer to [the Linux page](docs/linux/).
|
||||
|
||||
Can I use BSD?
|
||||
----------------------------------
|
||||
### Can I use BSD?
|
||||
|
||||
Absolutely! The Canoeboot firmware has good support for FreeBSD, NetBSD and
|
||||
OpenBSD. Other systems are untested, but should work just fine.
|
||||
|
|
@ -858,13 +864,49 @@ OpenBSD. Other systems are untested, but should work just fine.
|
|||
See:
|
||||
[docs/bsd/](docs/bsd/)
|
||||
|
||||
Are other operating systems compatible?
|
||||
-------------------------------------------------------------------
|
||||
### Windows??
|
||||
|
||||
Yes, you can use Windows 10 and 11. They are not officially supported and the
|
||||
Canoeboot project recommends that you *avoid* this choice, because Windows is
|
||||
proprietary software. What this means is that you do *not* have the freedom
|
||||
to use, study, adapt and share the software in any reasonable way. You are
|
||||
entirely at the mercy of Microsoft, whose motive is profit, as opposed to the
|
||||
general advancement of computer science and the welfare of everyone.
|
||||
|
||||
See: [What is Free Software?](https://writefreesoftware.org/learn)
|
||||
|
||||
In addition to being proprietary software, Windows is known to be full of bugs,
|
||||
including *backdoors*. When you *use* Windows, it will send information about
|
||||
you to third parties, used for a variety of purposes such as advertising, but
|
||||
it's quite possible that three-letter agencies may also receive your data if
|
||||
you use Windows.
|
||||
|
||||
For the sake of your freedom, you should never, ever use Windows. Use Linux or
|
||||
BSD systems, which are well-supported. Anyway:
|
||||
|
||||
[Video of Windows 10 booting up](https://yewtu.be/watch?v=BWq6XnWKQnM)
|
||||
|
||||
[Video of Windows 11 booting up](https://yewtu.be/watch?v=OFHiMfVNNeA)
|
||||
|
||||
Of note: Windows 11 officially requires at least TPM 1.2 to be supported, and
|
||||
it requires use of UEFI SecureBoot. To bypass this requirement, MajorGeeks has
|
||||
a guide, see: <https://www.majorgeeks.com/content/page/bypass_tpm.html>
|
||||
|
||||
The person who tested this also stated that they were unable to perform an
|
||||
in-place upgrade from 10 to 11, so they had to wipe the drive and perform a
|
||||
clean (note: not clean, because Windows is full of NSA spyware) installation.
|
||||
|
||||
In both cases, as shown above, the Windows operating system was booting from
|
||||
SeaBIOS, with the coreboot framebuffer initialised at startup, on an Intel GPU
|
||||
initialised via coreboot's *libgfxinit*, on November 2023 versions of Canoeboot.
|
||||
We do not yet support booting with UEFI on x86 machines.
|
||||
|
||||
### Are other operating systems compatible?
|
||||
|
||||
Unknown. Perhaps so, but it's impossible to say without further testing.
|
||||
|
||||
What level of freedom does Canoeboot give me?
|
||||
===================================================
|
||||
What level of software freedom does Canoeboot give me?
|
||||
--------------------------------------------------
|
||||
|
||||
Canoeboot firmware provides host hardware initialisation inside ROM files,
|
||||
that can be written to NOR flash, but on many systems there exist
|
||||
|
|
@ -908,7 +950,7 @@ exist, for example, the work done by Sam Zeloof and the Libre Silicon project:
|
|||
(Sam literally makes CPUs in his garage)
|
||||
|
||||
Where can I learn more about electronics
|
||||
==========================================
|
||||
----------------------------------------
|
||||
|
||||
* Basics of soldering and rework by PACE
|
||||
Both series of videos are mandatory regardless of your soldering skill.
|
||||
|
|
|
|||
212
site/faq.uk.md
212
site/faq.uk.md
|
|
@ -6,20 +6,17 @@ x-toc-enable: true
|
|||
Також відомо як Відповіді на часті питання
|
||||
|
||||
Важливі питання
|
||||
================
|
||||
---------------
|
||||
|
||||
Як скомпілювати Canoeboot з джерельного коду
|
||||
------------------------------------
|
||||
### Як скомпілювати Canoeboot з джерельного коду
|
||||
|
||||
Зверніться до [інструкцій зі збірки cbmk](docs/build/).
|
||||
|
||||
Як працює система збірки?
|
||||
-------------------------------
|
||||
### Як працює система збірки?
|
||||
|
||||
Зверніться до [посібника з обслуговування cbmk](docs/maintain/).
|
||||
|
||||
Не використовуйте CH341A!
|
||||
------------------
|
||||
### Не використовуйте CH341A!
|
||||
|
||||
Цей програматор SPI пошкодить ваш чіп і материнську плату, до якої він
|
||||
підключений.
|
||||
|
|
@ -27,8 +24,7 @@ x-toc-enable: true
|
|||
Прочитайте примітки щодо CH341A на [docs/install/spi.md](docs/install/spi.md), щоб
|
||||
вивчити більше.
|
||||
|
||||
Flashprog скаржиться на доступ DEVMEM
|
||||
--------------------------------------
|
||||
### Flashprog скаржиться на доступ DEVMEM
|
||||
|
||||
Якщо запущено `flashprog -p internal` для програмної перепрошивки та
|
||||
ви отримуєте помилку, пов'язану з доступом до /dev/mem, вам слід перезавантажити систему з
|
||||
|
|
@ -48,8 +44,7 @@ Error accessing DMI Table, 0x1000 bytes at 0x000000007fb27000
|
|||
/dev/mem mmap failed: Operation not permitted
|
||||
```
|
||||
|
||||
Підсвічування в лівій частині екрана стає темнішим
|
||||
---------------------------------------------------------------------------------------------------------------
|
||||
### Підсвічування в лівій частині екрана стає темнішим
|
||||
|
||||
Ми не знаємо, як визначити правильне значення ШІМ для використання в
|
||||
coreboot, тому ми просто використовуємо стандартне в coreboot, який має
|
||||
|
|
@ -58,8 +53,7 @@ coreboot, тому ми просто використовуємо стандар
|
|||
Ви можете вирішити цю проблему у своєму дистрибутиві, дотримуючись приміток на
|
||||
[документація: контроль підсвічуванням](../docs/misc/#finetune-backlight-control-on-intel-gpus).
|
||||
|
||||
Ethernet не працює на моєму X200/T400/X60/T60, коли я його підключаю
|
||||
-------------------------------------------------------------------
|
||||
### Ethernet не працює на моєму X200/T400/X60/T60, коли я його підключаю
|
||||
|
||||
Це спостерігалося в деяких системах, які використовують network-manager. Таке буває
|
||||
як в оригінальному BIOS, так і в Canoeboot. Це примха в
|
||||
|
|
@ -75,8 +69,7 @@ Ethernet не працює на моєму X200/T400/X60/T60, коли я йог
|
|||
(назва служби може відрізнятися для вас, залежно від вашої
|
||||
конфігурації)
|
||||
|
||||
які слід враховувати на апаратному забезпеченні AMD
|
||||
---------------------------------------------------
|
||||
### Мій KCMA-D8 або KGPE-D16 не завантажується з встановленим модулем PIKE2008
|
||||
|
||||
Завантаження Option ROM з модуля PIKE2008 на ASUS KCMA-D8
|
||||
або KGPE-D16 викликає зависання системи під час завантаження. Можна використовувати
|
||||
|
|
@ -85,8 +78,7 @@ Ethernet не працює на моєму X200/T400/X60/T60, коли я йог
|
|||
це в Linux. Ядро Linux здатне використовувати PIKE2008
|
||||
модуль без завантаження Option ROM.
|
||||
|
||||
Як зберегти журнали паніки ядра на ноутбуках Thinkpad?
|
||||
--------------------------------------------------
|
||||
### Як зберегти журнали паніки ядра на ноутбуках Thinkpad?
|
||||
|
||||
Найпростіший спосіб зробити це за допомогою netconsole ядра
|
||||
і відтворення паніки. Netconsole вимагає двох машин, тієї, що є
|
||||
|
|
@ -151,23 +143,21 @@ Ethernet не працює на моєму X200/T400/X60/T60, коли я йог
|
|||
7. Спробуйте відтворити паніку ядра.
|
||||
|
||||
Апаратна сумісність
|
||||
======================
|
||||
-------------------
|
||||
|
||||
Які системи сумісні з Canoeboot?
|
||||
-----------------------------------------------------------------------------------
|
||||
### Які системи сумісні з Canoeboot?
|
||||
|
||||
Будь-яку систему можна легко додати, тому *сумісність* посилається до будь-якої
|
||||
інтегрованої до системи побудови `cbmk` плати, яку Canoeboot використовує.
|
||||
|
||||
The [installation page](docs/install/) lists compatible machines.
|
||||
|
||||
Пастки свободи з сучасним обладнанням Intel {#intel}
|
||||
----------------------------------------------------
|
||||
### Пастки свободи з сучасним обладнанням Intel {#intel}
|
||||
|
||||
Coreboot номінально є вільним програмним забезпеченням, але для більшості x86
|
||||
цілей, які він підтримує, потрібні двійкові блоби, як на Intel, так і на AMD.
|
||||
|
||||
### Intel Management Engine (ME) {#intelme}
|
||||
#### Intel Management Engine (ME) {#intelme}
|
||||
|
||||
ПРИМІТКА: Інформація нижче трохи застаріла. Зараз Intel ME не
|
||||
працює на співпроцесорі ARC, а працює на архітектурі модифікованого процесора Intel 486,
|
||||
|
|
@ -328,7 +318,7 @@ wiki](http://www.coreboot.org/Intel_Management_Engine), та
|
|||
Revealed (Розкрито вбудовану технологію безпеки платформи)](https://www.apress.com/9781430265719)*** чудово описує в
|
||||
значних подробицях архітектуру апаратного забезпечення ME та прикладні модулі мікропрограми.
|
||||
|
||||
### Firmware Support Package (FSP) {#fsp}
|
||||
#### Firmware Support Package (FSP) {#fsp}
|
||||
|
||||
У всіх останніх системах Intel, підтримка coreboot обертається навколо
|
||||
інтеграції блоба (для кожної системи) під назвою *FSP* (Firmware Support Package, пакет підтримки
|
||||
|
|
@ -347,7 +337,7 @@ Revealed (Розкрито вбудовану технологію безпек
|
|||
руткітів SMM було продемонстровано в природі (використайте пошукову систему,
|
||||
щоб знайти їх).
|
||||
|
||||
### Оновлення мікрокода ЦП {#microcode}
|
||||
#### Оновлення мікрокода ЦП {#microcode}
|
||||
|
||||
Мікрокод налаштовує логічні вентилі у вашому ЦП, щоб реалізувати архітектуру
|
||||
набору інструкцій. Ваш ЦП уже містить їх, але він також надає спосіб оновлення
|
||||
|
|
@ -366,34 +356,12 @@ Revealed (Розкрито вбудовану технологію безпек
|
|||
І відео, і репозиторій дають деяку додаткову інформацію про мікрокод
|
||||
ЦП. Те, як це працює на AMD, буде дуже схожим на Intel.
|
||||
|
||||
### Intel не співпрацює
|
||||
|
||||
Роками coreboot бореться з Intel. Виявилося, що Intel загалом
|
||||
вкрай відмовляється від співпраці. Багато розробників coreboot
|
||||
і компаній намагалися залучити Intel до співпраці; а саме,
|
||||
випуск джерельного коду для компонентів мікропрограми. Навіть Google, що
|
||||
продає мільйони *хромбуків* (з попередньо встановленим coreboot) не змогла їх
|
||||
переконати.
|
||||
|
||||
Навіть коли Intel співпрацює, вони все одно не надають джерельний код.
|
||||
Вони можуть надавати обмежену інформацію (таблиці даних) відповідно до суворої
|
||||
корпоративної NDA (угоди про нерозголошення), але навіть це не
|
||||
гарантується. Навіть ODM та IBV не можуть отримати джерельний код від Intel, в
|
||||
більшості випадків (вони просто інтегрують блоки, надані Intel).
|
||||
|
||||
Новіші графічні чіпсети Intel [вимагають блобів
|
||||
прошивки](https://01.org/linuxgraphics/intel-linux-graphics-firmwares?langredirect=1).
|
||||
|
||||
Проект Canoeboot *надає* деяку підтримку для новіших платформ Intel, але
|
||||
вам варто знати про ці проблемні питання, якщо ви вибираєте використовувати ці машини.
|
||||
|
||||
Підводні камені свободи, які слід враховувати на апаратному забезпеченні AMD {#amd}
|
||||
----------------------------------------------------------------------------
|
||||
### Підводні камені свободи, які слід враховувати на апаратному забезпеченні AMD {#amd}
|
||||
|
||||
AMD має більш-менш ту саму проблему, що й Intel, коли справа
|
||||
стосується свободи програмного забезпечення.
|
||||
|
||||
### AMD Platform Security Processor (PSP)
|
||||
#### AMD Platform Security Processor (PSP)
|
||||
|
||||
По суті, це власна версія [Intel Management
|
||||
Engine](#intelme) від AMD. Він має ті самі базові проблеми безпеки та свободи,
|
||||
|
|
@ -436,13 +404,13 @@ Management Engine), PSP від AMD також може діяти як тира
|
|||
на більшості апаратного забезпечення OEM, відключений лише на так званих процесорах
|
||||
"ентузіастів".
|
||||
|
||||
### Прошивка AMD IMC
|
||||
#### Прошивка AMD IMC
|
||||
|
||||
Прочитайте <https://www.coreboot.org/AMD_IMC>.
|
||||
|
||||
ПРИМІТКА: Ця секція є застарілою, та потребує очищення.
|
||||
|
||||
### Прошивка AMD SMU
|
||||
#### Прошивка AMD SMU
|
||||
|
||||
ПРИМІТКА: Ця секція є застарілою, та потребує очищення.
|
||||
|
||||
|
|
@ -460,7 +428,7 @@ Management Engine), PSP від AMD також може діяти як тира
|
|||
прошивкою, але у відповідній системі (ASUS F2A85-M) все ще були присутні
|
||||
інші блоби (Відео BIOS та інші).
|
||||
|
||||
### Прошивка AMD AGESA
|
||||
#### Прошивка AMD AGESA
|
||||
|
||||
ПРИМІТКА: Більше має бути написано про це, щоб відобразити сучасну реальність.
|
||||
Ситуація з AMD в останні роки змінилась. Інформація на цій сторінці поширених
|
||||
|
|
@ -472,14 +440,18 @@ Management Engine), PSP від AMD також може діяти як тира
|
|||
вони припинили випускати джерельний код і замість цього почали випускати AGESA у вигляді
|
||||
бінарних блобів. Це робить AGESA еквівалентом [Intel FSP](#fsp).
|
||||
|
||||
### Оновлення мікрокоду ЦП AMD
|
||||
#### Оновлення мікрокоду ЦП AMD
|
||||
|
||||
Прочитайте розділ Intel
|
||||
практично так само, хоча було виявлено, що з набагато пізнішим апаратним забезпеченням
|
||||
AMD можна працювати без оновлень мікрокоду. Невідомо, чи потрібні оновлення на всіх
|
||||
платах AMD (залежить від ЦП).
|
||||
|
||||
### AMD не співпрацює
|
||||
Проект Canoeboot не розцінює оновлення мікрокоду проблемою, і він
|
||||
вмикає їх за замовчуванням на всьому апаратному забезпеченні,
|
||||
яке підтримується.
|
||||
|
||||
#### AMD не співпрацює
|
||||
|
||||
Здавалося, що AMD була на правильному шляху в 2011 році, коли вони почала
|
||||
співпрацювати та випускати джерельний код для кількох критичних
|
||||
|
|
@ -506,22 +478,19 @@ Family 15h (на стороні AMD) або будь-яке інше, випущ
|
|||
Це також стосується викривачів або будь-кого, кому потрібна справжня конфіденційність та
|
||||
безпека.
|
||||
|
||||
<вставте сюди випадкову систему>, чи підтримується вона?
|
||||
--------------------------------------------------------------------------------------------------------
|
||||
### Привіт, у мене <вставте сюди випадкову систему>, чи підтримується вона?
|
||||
|
||||
Якщо в coreboot бракує підтримки для вашого апаратного забезпечення, ви мусите додати підтримку для нього.
|
||||
Будь-ласка, проконсультуйтесь з проектом coreboot для наставництва.
|
||||
|
||||
Загальні питання
|
||||
=================
|
||||
----------------
|
||||
|
||||
Як встановити Canoeboot?
|
||||
-------------------------------------------------------
|
||||
### Як встановити Canoeboot?
|
||||
|
||||
Подивіться [посібник з встановлення](docs/install/)
|
||||
|
||||
Як запрограмувати флеш-чіп SPI?
|
||||
---------------------------------------------------------------------------------
|
||||
### Як запрограмувати флеш-чіп SPI?
|
||||
|
||||
Зверніться до:\
|
||||
[Зовнішній перезапис 25xx NOR flash через протокол SPI](docs/install/spi.md)
|
||||
|
|
@ -529,8 +498,7 @@ Family 15h (на стороні AMD) або будь-яке інше, випущ
|
|||
Можна використовувати 16-контактний затискач SOIC на 8-контактній мікросхемі SOIC, якщо
|
||||
правильно впорядкувати контакти. Як правило, з'єднання більш міцне.
|
||||
|
||||
Як захистити флеш-чіп від запису?
|
||||
----------------------------------------------------------------------------
|
||||
### Як захистити флеш-чіп від запису?
|
||||
|
||||
За замовчуванням немає захисту від запису на системі Canoeboot. Це
|
||||
з міркувань зручності використання, оскільки більшість людей не мають легкого доступу до зовнішнього
|
||||
|
|
@ -550,8 +518,7 @@ Family 15h (на стороні AMD) або будь-яке інше, випущ
|
|||
ЗРОБИТИ: Задокументувати захист флеш-пам'яті на основі PRx на платформах Intel і дослідити інші
|
||||
методи на системах AMD.
|
||||
|
||||
Як змінити налаштування BIOS?
|
||||
------------------------------------------------------------------------
|
||||
### Як змінити налаштування BIOS?
|
||||
|
||||
Більшість налаштувань Canoeboot насправді використовує [корисне навантаження
|
||||
GRUB](http://www.coreboot.org/GRUB2). Більше інформації про корисні навантаження
|
||||
|
|
@ -585,8 +552,7 @@ coreboot вікі для більшої інформації.
|
|||
Це змінить за замовчуванням всередині образа ROM, і потім ви можете
|
||||
перепрошити його.
|
||||
|
||||
Як заповнити ROM перед перепрошивкою?
|
||||
--------------------------------------
|
||||
### Як заповнити ROM перед перепрошивкою?
|
||||
|
||||
Бажано просто використовувати більший образ ROM. Цей розділ був написаний здебільшого для
|
||||
материнських плат ASUS KCMA-D8 та KGPE-D16, де раніше ми надавали
|
||||
|
|
@ -625,8 +591,7 @@ ROM та флеш-чіпом. Випадок вище, наприклад:
|
|||
|
||||
Після видалення заповнення cbfstool зможе працювати із образом як зазвичай.
|
||||
|
||||
Чи потрібно встановлювати завантажувач під час встановлення дистрибутива?
|
||||
---------------------------------------------------------------------------------------------------
|
||||
### Чи потрібно встановлювати завантажувач під час встановлення дистрибутива?
|
||||
|
||||
Більшість налаштувань Canoeboot уже інтегрують завантажувач GRUB як
|
||||
*[корисне навантаження](http://www.coreboot.org/Payloads)*. Це означає, що завантажувач GRUB
|
||||
|
|
@ -644,8 +609,7 @@ HDD або SSD під час встановлення нового дистри
|
|||
тоді на вашому HDD або SSD використовується звичайний завантажувальний сектор MBR, як і слід було
|
||||
очікувати. Отже, наведені вище параграфи стосуються лише корисного навантаження GRUB.
|
||||
|
||||
Чи потрібно мені перепрошивати, коли я перевстановлю дистрибутив?
|
||||
-------------------------------------------------------------------------------------------
|
||||
### Чи потрібно мені перепрошивати, коли я перевстановлю дистрибутив?
|
||||
|
||||
Більше ні. Останні версії Canoeboot (з використанням корисного навантаження GRUB)
|
||||
автоматично переключатимуться на конфігурацію GRUB на HDD або SSD, якщо
|
||||
|
|
@ -657,16 +621,40 @@ GRUB (наприклад, флеш-накопичувач USB). Для
|
|||
Якщо ви використовуєте корисне навантаження SeaBIOS, це ще простіше. Це працює так, як ви
|
||||
очікували. SeaBIOS реалізує звичайний інтерфейс x86 BIOS.
|
||||
|
||||
Як виглядає флеш-чіп?
|
||||
-----------------------------------------------------------------
|
||||
### Як виглядає флеш-чіп?
|
||||
|
||||
Ви можете знайти фотографії різних видів чипів на наступній сторінці:\
|
||||
[Керівництво зовнішньої прошивки 25xx NOR](docs/install/spi.md)
|
||||
|
||||
Яке ще мікропрограмне забезпечення існує за межами Canoeboot?
|
||||
==================================================
|
||||
### tlp
|
||||
|
||||
### Зовнішні графічні карти
|
||||
Ви можете встановити пакет `tlp` та розпочати той сервіс. Наприклад, на
|
||||
Debian:
|
||||
|
||||
```
|
||||
apt-get install tlp tlp-rdw
|
||||
systemctl enable tlp
|
||||
systemctl start tlp
|
||||
```
|
||||
|
||||
Тепер прочитайте документацію:
|
||||
|
||||
```
|
||||
man tlp-stat
|
||||
```
|
||||
|
||||
Від імені root, ви можете зробити:
|
||||
|
||||
```
|
||||
tlp-stat -b
|
||||
```
|
||||
|
||||
Це надасть інформацію про батарею.
|
||||
|
||||
Яке ще мікропрограмне забезпечення існує за межами Canoeboot?
|
||||
------------------------------------------------------
|
||||
|
||||
#### Зовнішні графічні карти
|
||||
|
||||
Відео BIOS наявний на більшості графічних карт. Для інтегрованої графіки
|
||||
VBIOS (спеціальний вид OptionROM) зазвичай вбудовано
|
||||
|
|
@ -682,7 +670,7 @@ Canoeboot буде використовувати цей код, коли він
|
|||
В конфігураціях, де SeaBIOS і власна ініціалізація GPU використовуються разом,
|
||||
додається спеціальна прокладка VBIOS, яка використовує лінійний кадровий буфер coreboot.
|
||||
|
||||
### Прошивка EC (вбудований контролер)
|
||||
#### Прошивка EC (вбудований контролер)
|
||||
|
||||
Це є у більшості (всіх?) ноутбуків. EC (вбудований контролер) - це невеликий,
|
||||
окремий процесор, який в основному обробляє вхідні/вихідні дані, характерні
|
||||
|
|
@ -702,7 +690,7 @@ Canoeboot буде використовувати цей код, коли він
|
|||
EC присутній ледь не на всіх ноутбуках. Інші пристрої використовують, залежно від складності,
|
||||
або EC, або варіант із прошивкою в Mask ROM - SuperIO.
|
||||
|
||||
### Прошивка HDD/SSD
|
||||
#### Прошивка HDD/SSD
|
||||
|
||||
Жорсткі диски та твердотільні накопичувачі містять вбудоване програмне забезпечення,
|
||||
призначене для обробки внутрішньої роботи пристрою, водночас відкриваючи простий, стандартний інтерфейс (наприклад,
|
||||
|
|
@ -797,7 +785,6 @@ SATA через USB, і проект Canoeboot здатний завантажу
|
|||
звичайним чином. Проконсультуйтесь з документацією для вашої операційної системи Linux/BSD,
|
||||
щоб знати те, як встановити їх з *повнодисковим шифруванням*:
|
||||
|
||||
|
||||
Поточна теорія (недоведена) полягає в тому, що це принаймні запобіжить
|
||||
зловмисним дискам неправильно маніпулювати даними, які зчитуються з диска
|
||||
або записуються на диск, оскільки він не може отримати доступ до вашого ключа LUKS,
|
||||
|
|
@ -807,7 +794,7 @@ SATA через USB, і проект Canoeboot здатний завантажу
|
|||
**Сприймайте сказане в цьому абзаці з дрібкою солі. Це все ще обговорюється
|
||||
і нічого з цього не доведено.**
|
||||
|
||||
### NIC (контролер ethernet)
|
||||
#### NIC (контролер ethernet)
|
||||
|
||||
Мережеві карти Ethernet зазвичай запускають вбудоване програмне забезпечення, яке відповідає
|
||||
за внутрішню ініціалізацію пристрою. Теоретично його можна налаштувати
|
||||
|
|
@ -816,19 +803,19 @@ SATA через USB, і проект Canoeboot здатний завантажу
|
|||
З належним IOMMU можна було би пом'якшити проблеми, пов'язані з DMA.
|
||||
Також можна використовувати мережевий адаптер USB, який не має DMA.
|
||||
|
||||
### Мікрокод процесора
|
||||
#### Мікрокод процесора
|
||||
|
||||
Мікрокод налаштовує масиви логічних вентилів у мікропроцесорі для реалізації
|
||||
архітектури набору інструкцій. Спеціальні *декодери* в мікропроцесорі налаштують
|
||||
схему на основі цього мікрокоду.
|
||||
|
||||
### Звукова карта
|
||||
#### Звукова карта
|
||||
|
||||
Звукове обладнання (інтегроване чи дискретне) зазвичай має вбудоване програмне забезпечення
|
||||
(DSP) для обробки введення/виведення. Знову ж таки, USB DAC є хорошим
|
||||
обхідним шляхом.
|
||||
|
||||
### Веб-камера
|
||||
#### Веб-камера
|
||||
|
||||
Веб-камери мають вбудоване програмне забезпечення, яке обробляє зображення, що вводиться
|
||||
в камеру; налаштування фокуса, балансу білого тощо. Можна використовувати апаратне забезпечення
|
||||
|
|
@ -836,12 +823,12 @@ SATA через USB, і проект Canoeboot здатний завантажу
|
|||
(наприклад, на ноутбуках) не рекомендовані проектом Canoeboot з
|
||||
міркувань безпеки.
|
||||
|
||||
### Хост-контролер USB
|
||||
#### Хост-контролер USB
|
||||
|
||||
Хост-контролери USB потребують мікропрограми. Іноді це потрібно надати
|
||||
самому coreboot.
|
||||
|
||||
### Прошивка WWAN
|
||||
#### Прошивка WWAN
|
||||
|
||||
Деякі ноутбуки можуть мати пристрій для зчитування SIM-карт із карткою для роботи з
|
||||
WWAN, підключення до мережі 3g/4g (наприклад, GSM). Це та
|
||||
|
|
@ -868,10 +855,9 @@ WWAN, підключення до мережі 3g/4g (наприклад, GSM).
|
|||
оскільки вони, як правило, набагато безпечніші.
|
||||
|
||||
Операційні системи
|
||||
=================
|
||||
------------------
|
||||
|
||||
Чи я можу використовувати Linux?
|
||||
--------------------------------------------------
|
||||
### Чи я можу використовувати Linux?
|
||||
|
||||
Абсолютно! Він добре перевірений в Canoeboot, та дуже рекомендований. Подивіться
|
||||
[встановлення Linux](../docs/linux/grub_boot_installer.md) та
|
||||
|
|
@ -880,15 +866,13 @@ WWAN, підключення до мережі 3g/4g (наприклад, GSM).
|
|||
Будь-який сучасний дистрибутив має працювати, допоки він використовує KMS (kernel mode
|
||||
setting) для графіки.
|
||||
|
||||
Fedora не завантажується? (також може бути застосовано до Redhat/CentOS)
|
||||
-----------------------------------------------------------
|
||||
### Fedora не завантажується? (також може бути застосовано до Redhat/CentOS)
|
||||
|
||||
У Fedora типово grub.cfg намагається завантажити linux в 16-розрядному режимі.
|
||||
Вам просто потрібно змінити конфігурацію GRUB Fedora.
|
||||
Зверніться до [сторінки Linux](docs/linux/).
|
||||
|
||||
Чи я можу використовувати BSD?
|
||||
----------------------------------
|
||||
### Чи я можу використовувати BSD?
|
||||
|
||||
Абсолютно! Прошивка Canoeboot має добру підтримку для FreeBSD, NetBSD та
|
||||
OpenBSD. Інші системи не перевірені, але мають працювти нормально.
|
||||
|
|
@ -896,13 +880,49 @@ OpenBSD. Інші системи не перевірені, але мають п
|
|||
Дивіться:
|
||||
[docs/bsd/](docs/bsd/index.uk.md)
|
||||
|
||||
Чи підтримуються інші операційні системи?
|
||||
-------------------------------------------------------------------
|
||||
### Windows??
|
||||
|
||||
Yes, you can use Windows 10 and 11. They are not officially supported and the
|
||||
Canoeboot project recommends that you *avoid* this choice, because Windows is
|
||||
proprietary software. What this means is that you do *not* have the freedom
|
||||
to use, study, adapt and share the software in any reasonable way. You are
|
||||
entirely at the mercy of Microsoft, whose motive is profit, as opposed to the
|
||||
general advancement of computer science and the welfare of everyone.
|
||||
|
||||
See: [What is Free Software?](https://writefreesoftware.org/learn)
|
||||
|
||||
In addition to being proprietary software, Windows is known to be full of bugs,
|
||||
including *backdoors*. When you *use* Windows, it will send information about
|
||||
you to third parties, used for a variety of purposes such as advertising, but
|
||||
it's quite possible that three-letter agencies may also receive your data if
|
||||
you use Windows.
|
||||
|
||||
For the sake of your freedom, you should never, ever use Windows. Use Linux or
|
||||
BSD systems, which are well-supported. Anyway:
|
||||
|
||||
[Video of Windows 10 booting up](https://yewtu.be/watch?v=BWq6XnWKQnM)
|
||||
|
||||
[Video of Windows 11 booting up](https://yewtu.be/watch?v=OFHiMfVNNeA)
|
||||
|
||||
Of note: Windows 11 officially requires at least TPM 1.2 to be supported, and
|
||||
it requires use of UEFI SecureBoot. To bypass this requirement, MajorGeeks has
|
||||
a guide, see: <https://www.majorgeeks.com/content/page/bypass_tpm.html>
|
||||
|
||||
The person who tested this also stated that they were unable to perform an
|
||||
in-place upgrade from 10 to 11, so they had to wipe the drive and perform a
|
||||
clean (note: not clean, because Windows is full of NSA spyware) installation.
|
||||
|
||||
In both cases, as shown above, the Windows operating system was booting from
|
||||
SeaBIOS, with the coreboot framebuffer initialised at startup, on an Intel GPU
|
||||
initialised via coreboot's *libgfxinit*, on November 2023 versions of Canoeboot.
|
||||
We do not yet support booting with UEFI on x86 machines.
|
||||
|
||||
### Чи підтримуються інші операційні системи?
|
||||
|
||||
Невідомо. Можливо, але неможливо сказати без подальшого випробовування.
|
||||
|
||||
Який рівень програмної свободи дає мені Canoeboot?
|
||||
===================================================
|
||||
--------------------------------------------------
|
||||
|
||||
Прошивка Canoeboot надає ініціалізацію апаратного забезпечення хоста всередині файлів ROM,
|
||||
що може бути записано на флеш NOR, але на багатьох системах існує
|
||||
|
|
@ -946,7 +966,7 @@ OpenBSD. Інші системи не перевірені, але мають п
|
|||
(Сем буквально робить процесори в своєму гаражі)
|
||||
|
||||
Де я можу вивчати більше про електроніку
|
||||
==========================================
|
||||
----------------------------------------
|
||||
|
||||
* Основи пайки та переробки від PACE
|
||||
Обидві серії відео є обов'язковими незалежно від ваших навичок паяння.
|
||||
|
|
|
|||
|
|
@ -3,11 +3,8 @@ title: Code review
|
|||
x-toc-enable: true
|
||||
...
|
||||
|
||||
If you wish to submit patches, you can. Submit them, using the instructions
|
||||
provided in the following sections:
|
||||
|
||||
Canoeboot Repositories
|
||||
===================
|
||||
---------------------
|
||||
|
||||
Informationen darüber wer an Canoeboot arbeitet und wer das Projekt betreibt
|
||||
sind unter [who.de.md](who.de.md) zu finden.
|
||||
|
|
@ -22,8 +19,23 @@ Die Entwicklung von Canoeboot findet mithilfe der Versionskontrolle von
|
|||
Git statt. Sieh in der [offiziellen Git Dokumentation](https://git-scm.com/doc)
|
||||
nach, sofern Du nicht weisst wie man Git verwendet.
|
||||
|
||||
cbmk (canoeboot-make)
|
||||
---------------------
|
||||
Das `bucts` Repository wird auch vom Canoeboot Projekt gehostet, da das
|
||||
Original Repository auf `stuge.se` nicht mehr verfügbar ist, seit wie dies
|
||||
zuletzt geprüft haben. Das `bucts` Programm wurde von Peter Stuge geschrieben.
|
||||
Du benötigst `bucts` sofern Du ein Canoeboot ROM intern auf ein Thinkpad X60
|
||||
oder T60 flashen möchtest, welches (derzeit) noch ein nicht-freies Lenovo
|
||||
BIOS verwendet. Anleitungen hierfür findest Du hier:\
|
||||
[Canoeboot Installations Anleitungen](docs/install/)
|
||||
|
||||
Das `ich9utils` Repository wird erheblich vom `cbmk` build system verwendet.
|
||||
Du kannst `ich9utils` allerdings auch separat herunterladen und verwenden.
|
||||
Es erzeugt ICH9M descriptor+GbE Images für GM45 ThinkPads welche die ICH9M
|
||||
Southbridge verwenden. Es könnte auch für andere Systeme funktionieren,
|
||||
welche dieselbe Platform bzw. denselben Chipsatz verwenden.
|
||||
Dokumentation für `ich9utils` ist hier verfügbar:\
|
||||
[ich9utils Dokumentation](docs/install/ich9utils.md)
|
||||
|
||||
### cbmk (canoeboot-make)
|
||||
|
||||
Dies ist das zentrale build system in Canoeboot. Man könnte auch sagen `cbmk` *ist*
|
||||
Canoeboot! Das Git repository herunterladen:
|
||||
|
|
@ -42,8 +54,7 @@ Für Anleitungen bzgl. `cbmk` build, siehe [build Anleitungen](docs/build/).
|
|||
Informationen über das build system selbst und wie es funktioniert, sind
|
||||
verfügbar unter dem [cbmk maintenance guide](docs/maintain/).
|
||||
|
||||
cbwww and cbwww-img
|
||||
-------------------
|
||||
### cbwww and cbwww-img
|
||||
|
||||
Die *gesamte* Canoeboot Website sowie Dokumentation befindet sich in einem
|
||||
Git Repository.
|
||||
|
|
@ -112,8 +123,7 @@ Repository dorthin. Konfiguriere deinen lokalen HTTP Server entsprechend.
|
|||
|
||||
Nochmal, Anleitungen hierfür findest Du auf der Untitled Webseite.
|
||||
|
||||
Name nicht erforderlich
|
||||
-----------------
|
||||
### Name nicht erforderlich
|
||||
|
||||
Beiträge die Du hinzufügst, werden in einem für jeden zugänglichen Git
|
||||
Repository öffentlich aufgezeichnet. Dies betrifft ebenso den Namen sowie
|
||||
|
|
@ -141,8 +151,37 @@ Commits/Patches verwendest dann solltest Du anonym sein. Verwende
|
|||
und [git show](https://git-scm.com/docs/git-show) um dies zu überprüfen
|
||||
bevor Du einem öffentlichen Git Repository Änderungen hinzufügst.
|
||||
|
||||
Patches senden
|
||||
------------
|
||||
### Lizenzen (für Mitwirkende)
|
||||
|
||||
Stelle sicher, dass deine Beiträge mit einer libre Lizenz frei lizensiert
|
||||
sind. Canoeboot schreibt nicht mehr vor, welche Lizenzen akzeptiert werden,
|
||||
und es existieren einige Lizenzen. Wir werden deinen Beitrag prüfen und
|
||||
dir mitteilen sofern es ein Problem damit gibt (z.B. keine Lizenz).
|
||||
|
||||
Gib *immer* eine Lizenz an für deine Arbeit! Keine Lizenz anzugeben bedeutet
|
||||
das deine Arbeit unter die Standard Urheberrechte fällt, was deine Arbeit
|
||||
proprietär macht und somit von denselben Einschränkungen betroffen ist.
|
||||
|
||||
Die MIT Lizenz ist ein guter Start, und sie ist die bevorzugte Lizenz
|
||||
für sämtliche Arbeit an Canoeboot, aber wir sind nicht pingelig. Canoeboot
|
||||
hat in der Vergangenheit GNU Lizenzen so wie GPL verwendet; vieles davon
|
||||
besteht nach wie vor und wird auch weiterhin bestehen.
|
||||
Es ist deine Arbeit; sofern deine Arbeit auf der Arbeit eines anderen basiert,
|
||||
ist es aufgrund der Lizenz-Kompatibilität ggfs. naheliegend diesselbe Lizenz zu
|
||||
verwenden.
|
||||
|
||||
[Hier](https://opensource.org/licenses) findest Du übliche Beispiele für Lizenzen.
|
||||
|
||||
*Wenn* deine Arbeit auf bestehender Arbeit basiert, dann ist es wichtig
|
||||
(für deinen Beitrag) das die Lizenz deiner Arbeit kompatibel ist mit der
|
||||
Lizenz der Arbeit auf der sie beruht. Die MIT Lizenz ist hierfür gut geeignet,
|
||||
weil sie mit vielen anderen Lizenen kompatibel ist, und Freiheit zulässt
|
||||
(wie zum Beispiel die Freiheit einer SubLizenz) was bei vielen anderen
|
||||
Lizenzen nicht der Fall ist:
|
||||
|
||||
<https://opensource.org/licenses/MIT>
|
||||
|
||||
### Patches senden
|
||||
|
||||
Erstelle einen Account unter <https://codeberg.org/> und navigiere (während
|
||||
Du eingeloggt bist) zu dem Repository das Du bearbeiten möchtest. Klicke
|
||||
|
|
@ -173,9 +212,6 @@ Ein weiterer Weg Patches zu senden ist Leah Rowe direkt eine email zu senden:
|
|||
Um den Prozess der Quelltext Überprüfung transparent zu gestalten,
|
||||
wird jedoch empfohlen künftig Codeberg zu verwenden.
|
||||
|
||||
Git mirrors
|
||||
===========
|
||||
|
||||
Mirrors für cbmk.git
|
||||
--------------------
|
||||
|
||||
|
|
@ -193,8 +229,12 @@ angeklickt werden, um Änderungen in deinem Web Browser anzusehen):
|
|||
* <https://gitlab.com/canoeboot/cbmk>
|
||||
* <https://notabug.org/canoeboot/cbmk>
|
||||
|
||||
cbwww.git Mirror
|
||||
----------------
|
||||
Mirrors fur pico-serprog.git
|
||||
----------------------------
|
||||
|
||||
* <https://notabug.org/libreboot/pico-serprog>
|
||||
|
||||
### cbwww.git Mirror
|
||||
|
||||
Das `cbwww` Repository enthält Markdown Dateien (Pandoc Variant), für die
|
||||
Verwendung mit dem [Untitled Static Site Generator](https://untitled.vimuser.org/);
|
||||
|
|
@ -215,9 +255,6 @@ anklicken um Änderungen in deinem Web Browser anzusehen). Siehe:
|
|||
cbwww-img.git Mirror
|
||||
----------------
|
||||
|
||||
Du kannst `git clone` für diese Links ausführen und/oder die Links
|
||||
anklicken um Änderungen in deinem Web Browser anzusehen). Siehe:
|
||||
|
||||
* <https://git.sr.ht/~canoeboot/cbwww-img>
|
||||
* <https://git.disroot.org/canoeboot/cbwww-img>
|
||||
* <https://gitea.treehouse.systems/canoeboot/cbwww-img>
|
||||
|
|
|
|||
67
site/git.md
67
site/git.md
|
|
@ -3,11 +3,8 @@ title: Code review
|
|||
x-toc-enable: true
|
||||
...
|
||||
|
||||
If you wish to submit patches, you can. Submit them, using the instructions
|
||||
provided in the following sections:
|
||||
|
||||
Canoeboot repositories
|
||||
===================
|
||||
----------------------
|
||||
|
||||
Information about who works on canoeboot and who runs the project can be
|
||||
found on [who.md](who.md)
|
||||
|
|
@ -22,8 +19,14 @@ Development of canoeboot is done using the Git version control system.
|
|||
Refer to the [official Git documentation](https://git-scm.com/doc) if you don't
|
||||
know how to use Git.
|
||||
|
||||
cbmk (canoeboot-make)
|
||||
---------------------
|
||||
The `bucts` repository is hosted by the Canoeboot project, because the original
|
||||
repository on `stuge.se` is no longer available, last time we checked. The
|
||||
`bucts` program was written by Peter Stuge. You need `bucts` if you're flashing
|
||||
internally an Canoeboot ROM onto a ThinkPad X60 or T60 that is currently running
|
||||
the original Lenovo BIOS. Instructions for that are available here:\
|
||||
[Canoeboot installation guides](docs/install/)
|
||||
|
||||
### cbmk (canoeboot-make)
|
||||
|
||||
This is the core build system in canoeboot. You could say that `cbmk` *is*
|
||||
canoeboot! Download the Git repository:
|
||||
|
|
@ -41,8 +44,7 @@ build `cbmk`, refer to the [build instructions](docs/build/).
|
|||
Information about the build system itself, and how it works, is available in
|
||||
the [cbmk maintenance guide](docs/maintain/).
|
||||
|
||||
cbwww and cbwww-img
|
||||
-------------------
|
||||
### cbwww and cbwww-img
|
||||
|
||||
The *entire* canoeboot website and documentation is hosted in a Git repository.
|
||||
Download it like so:
|
||||
|
|
@ -107,8 +109,7 @@ repository there. Configure your local HTTP server accordingly.
|
|||
|
||||
Again, instructions are available on the Untitled website for this purpose.
|
||||
|
||||
Name not required
|
||||
-----------------
|
||||
### Name not required
|
||||
|
||||
Contributions that you make are publicly recorded, in a Git repository which
|
||||
everyone can access. This includes the name and email address of the
|
||||
|
|
@ -133,8 +134,36 @@ should be fairly anonymous. Use
|
|||
and [git show](https://git-scm.com/docs/git-show) to confirm that before you
|
||||
push changes to a public Git repository.
|
||||
|
||||
Send patches
|
||||
------------
|
||||
### Licenses (for contributors)
|
||||
|
||||
Make sure to freely license your work, under a libre license. Canoeboot no
|
||||
longer sets arbitrary restrictions on what licenses are accepted, and many
|
||||
licenses out there already exist. We will audit your contribution and tell
|
||||
you if there are problems with it (e.g. no license).
|
||||
|
||||
*Always* declare a license on your work! Not declaring a license means that
|
||||
the default, restrictive copyright laws apply, which would make your work
|
||||
proprietary, subject to all of the same restrictions.
|
||||
|
||||
The MIT license is a good one to start with, and it is the preferred license
|
||||
for all new works in Canoeboot, but we're not picky. Canoeboot has historically
|
||||
used mostly GPL licensing; much of that remains, and is likely to remain.
|
||||
It's your work; obviously, if you're deriving from an existing work,
|
||||
it may make sense to use the same license on your contribution, for license
|
||||
compatibility.
|
||||
|
||||
You can find common examples of licenses
|
||||
[here](https://opensource.org/licenses).
|
||||
|
||||
If you *are* deriving from an existing work, it's important that your license
|
||||
(for your contribution) be compatible with the licensing of the work from which
|
||||
yours was derived. The MIT license is good because it's widely compatible
|
||||
with many other licenses, and permits many freedoms (such as the freedom to
|
||||
sublicense) that other licenses do not:
|
||||
|
||||
<https://opensource.org/licenses/MIT>
|
||||
|
||||
### Send patches
|
||||
|
||||
Make an account on <https://codeberg.org/> and navigate (while logged in) to the
|
||||
repository that you wish to work on. Click *Fork* and in your account,
|
||||
|
|
@ -160,9 +189,6 @@ Another way to submit patches is to email Leah Rowe directly:
|
|||
However, for transparency of the code review process, it's recommended that you
|
||||
use Codeberg, for the time being.
|
||||
|
||||
Git mirrors
|
||||
===========
|
||||
|
||||
Mirrors of cbmk.git
|
||||
-------------------
|
||||
|
||||
|
|
@ -180,8 +206,12 @@ to view changes in your Web browser):
|
|||
* <https://gitlab.com/canoeboot/cbmk>
|
||||
* <https://notabug.org/canoeboot/cbmk>
|
||||
|
||||
cbwww.git mirror
|
||||
----------------
|
||||
Mirrors of pico-serprog.git
|
||||
--------------------------
|
||||
|
||||
* <https://notabug.org/libreboot/pico-serprog>
|
||||
|
||||
### cbwww.git mirror
|
||||
|
||||
The `cbwww` repository contains Markdown files (pandoc variant), for use
|
||||
with the [Untitled Static Site Generator](https://untitled.vimuser.org/); this
|
||||
|
|
@ -202,9 +232,6 @@ Web browser. See:
|
|||
cbwww-img.git mirror
|
||||
----------------
|
||||
|
||||
You can run `git clone` on these links, and/or click to view changes in your
|
||||
Web browser. See:
|
||||
|
||||
* <https://git.sr.ht/~canoeboot/cbwww-img>
|
||||
* <https://git.disroot.org/canoeboot/cbwww-img>
|
||||
* <https://gitea.treehouse.systems/canoeboot/cbwww-img>
|
||||
|
|
|
|||
|
|
@ -7,7 +7,7 @@ If you wish to submit patches, you can. Submit them, using the instructions
|
|||
provided in the following sections:
|
||||
|
||||
репозиторії Canoeboot
|
||||
===================
|
||||
--------------------
|
||||
|
||||
Інформацію про те, хто працює над canoeboot і хто керує проектом, можна
|
||||
знайти на [who.uk.md](who.uk.md)
|
||||
|
|
@ -22,8 +22,7 @@ provided in the following sections:
|
|||
Зверніться до [офіційної документації Git](https://git-scm.com/doc), якщо ви не
|
||||
знаєте, як користуватися Git.
|
||||
|
||||
cbmk (canoeboot-make)
|
||||
---------------------
|
||||
### cbmk (canoeboot-make)
|
||||
|
||||
Це основна система збирання в canoeboot. Можна сказати, що `cbmk` *це*
|
||||
canoeboot! Завантажте репозиторій Git:
|
||||
|
|
@ -41,8 +40,7 @@ canoeboot! Завантажте репозиторій Git:
|
|||
Інформація про саму систему збірки та про те, як вона працює, доступна в
|
||||
[посібнику обслуговування cbmk](docs/maintain/).
|
||||
|
||||
cbwww та cbwww-img
|
||||
-------------------
|
||||
### cbwww та cbwww-img
|
||||
|
||||
*Весь* веб-сайт і документація canoeboot розміщені в репозиторії Git.
|
||||
Завантажте так:
|
||||
|
|
@ -107,8 +105,7 @@ Untitled.
|
|||
|
||||
Знову ж таки, інструкції для цього доступні на веб-сайті Untitled.
|
||||
|
||||
Ім'я не вимагається
|
||||
-----------------
|
||||
#### Ім'я не вимагається
|
||||
|
||||
Внески, які ви робите, реєструються публічно в репозиторії Git, доступ
|
||||
до якого мають всі. Це включає ім'я та електронну адресу
|
||||
|
|
@ -133,8 +130,7 @@ Untitled.
|
|||
та [git show](https://git-scm.com/docs/git-show), щоб підтвердити це перед тим, як ви
|
||||
надсилаєте зміни до загальнодоступного сховища Git.
|
||||
|
||||
Надсилайте виправлення
|
||||
------------
|
||||
### Надсилайте виправлення
|
||||
|
||||
Створіть обліковий запис на <https://codeberg.org/> і перейдіть (увійшовши в систему) до
|
||||
репозиторію, над яким ви хочете працювати. Натисніть *Fork*, і у вашому обліковому записі,
|
||||
|
|
@ -161,10 +157,9 @@ IRC-канал canoeboot і повідомити канал, які виправ
|
|||
використовувати Codeberg.
|
||||
|
||||
Дзеркала Git
|
||||
============
|
||||
------------
|
||||
|
||||
Дзеркала cbmk.git
|
||||
----------------
|
||||
### Дзеркала cbmk.git
|
||||
|
||||
Репозиторій `cbmk` містить автоматизовану систему побудови Canoeboot, що
|
||||
створює випуски Canoeboot (включаючи зібрані образи ROM).
|
||||
|
|
@ -180,8 +175,7 @@ IRC-канал canoeboot і повідомити канал, які виправ
|
|||
* <https://gitlab.com/canoeboot/cbmk>
|
||||
* <https://notabug.org/canoeboot/cbmk>
|
||||
|
||||
дзеркало cbwww.git
|
||||
----------------
|
||||
### дзеркало cbwww.git
|
||||
|
||||
Репозиторій `cbwww` містить файли Markdown (варіант pandoc), для використання
|
||||
з [генератором статичних сайтів Untitled](https://untitled.vimuser.org/); це те,
|
||||
|
|
@ -199,8 +193,7 @@ IRC-канал canoeboot і повідомити канал, які виправ
|
|||
* <https://gitlab.com/canoeboot/cbwww>
|
||||
* <https://notabug.org/canoeboot/cbwww>
|
||||
|
||||
дзеркало cbwww-img.git
|
||||
----------------
|
||||
### дзеркало cbwww-img.git
|
||||
|
||||
Ви можете виконати `git clone` на цих посиланнях, та/або натиснути для перегляду змін в вашому
|
||||
веб-браузері. Дивіться:
|
||||
|
|
|
|||
|
|
@ -42,7 +42,7 @@ you continue to use your hardware, with continued firmware updates. All of this
|
|||
is *why* Canoeboot exists.
|
||||
|
||||
Overview of Canoeboot design
|
||||
============================
|
||||
----------------------------
|
||||
|
||||
<img tabindex=1 class="l" src="https://av.canoeboot.org/dip8/adapter.jpg" /><span class="f"><img src="https://av.canoeboot.org/dip8/adapter.jpg" /></span>
|
||||
|
||||
|
|
@ -70,7 +70,7 @@ Canoeboot, coreboot would be inaccessible for most users; you can also
|
|||
still [reconfigure](docs/maintain/) Canoeboot however you wish.
|
||||
|
||||
Why use Canoeboot?
|
||||
==================
|
||||
------------------
|
||||
|
||||
<img tabindex=1 class="r" style="max-width:25%;" src="https://av.vimuser.org/uboot-canoe.png" /><span class="f"><img src="https://av.vimuser.org/uboot-canoe.png" /></span>
|
||||
|
||||
|
|
@ -84,7 +84,7 @@ whereas Canoeboot is specifically crafted for end users. In other words, the
|
|||
purpose of Canoeboot is to *Just Work*. Direct configuration and installation
|
||||
of coreboot is also possible, but Canoeboot makes it *much* easier.
|
||||
|
||||
Canoeboot gives you [freedoms](https://writefreesoftware.org/) that
|
||||
Canoeboot gives you [Free Software](https://writefreesoftware.org/) that
|
||||
you otherwise can't get with most other boot firmware, plus faster boot speeds
|
||||
and [better security](docs/linux/grub_hardening.md). It's extremely powerful
|
||||
and [configurable](docs/maintain/) for many use cases. If you're unhappy with
|
||||
|
|
@ -119,7 +119,7 @@ over your own property (your computer), and so, we make it our mission to help
|
|||
you [wrest](https://trmm.net/TOCTOU/) back such control.
|
||||
|
||||
Canoeboot is not a fork of coreboot
|
||||
===================================
|
||||
-----------------------------------
|
||||
|
||||
<img tabindex=1 class="r" style="max-width:15%;" src="https://av.canoeboot.org/e6400/e6400-seabios.jpg" /><span class="f"><img src="https://av.canoeboot.org/e6400/e6400-seabios.jpg" /></span>
|
||||
|
||||
|
|
@ -146,8 +146,7 @@ knowledge or skill except the ability to
|
|||
follow [simplified instructions, written for non-technical
|
||||
users](docs/install/).
|
||||
|
||||
How to help Canoeboot
|
||||
=====================
|
||||
### How to help Canoeboot
|
||||
|
||||
The [Libreboot tasks page](https://libreboot.org/tasks/) lists tasks that
|
||||
could (will) be worked on. It will be updated over time as more tasks are
|
||||
|
|
@ -212,8 +211,7 @@ you can send patches.
|
|||
Any and all development discussion and user support are all done on the IRC
|
||||
channel. More information is on the [contact page](contact.md).
|
||||
|
||||
Translations needed, for canoeboot.org
|
||||
--------------------------------------
|
||||
### Translations needed, for canoeboot.org
|
||||
|
||||
If you want to help with translations, you can translate pages, update existing
|
||||
translations and submit your translated versions. For instructions, please
|
||||
|
|
|
|||
|
|
@ -10,7 +10,7 @@ published on 12 June 2024; nonetheless, the article date is set to June 9th.
|
|||
For changes up to June 12th, please read the Canoeboot 20240612 announcement.
|
||||
|
||||
Introduction
|
||||
============
|
||||
------------
|
||||
|
||||
Canoeboot is a free/libre boot firmware project. It replaces your
|
||||
proprietary BIOS/UEFI firmware, on supported x86 and ARM computers. It does
|
||||
|
|
@ -51,8 +51,7 @@ one as the *first* official Canoeboot Build System Audit, or *audit 1*.
|
|||
ALSO: Canoeboot 20240510 was released *during* the audit; this changelog is in
|
||||
reference to Canoeboot 20240504, *not* 20240510.
|
||||
|
||||
Modest code size reduction
|
||||
--------------------------
|
||||
### Modest code size reduction
|
||||
|
||||
There are 1054 lines of shell script in the build system, versus 1208 in the
|
||||
Canoeboot 20240504 release. Canoeboot's build system is written purely in
|
||||
|
|
@ -62,12 +61,11 @@ This is a difference of 154 lines, or a 13% reduction. Despite the reduction,
|
|||
numerous features have been added and a large number of bugs were fixed.
|
||||
|
||||
Summarised list of changes
|
||||
==========================
|
||||
--------------------------
|
||||
|
||||
Changes are in order per category, from newest to oldest:
|
||||
|
||||
Feature changes
|
||||
---------------
|
||||
### Feature changes
|
||||
|
||||
* **Download crossgcc tarballs as dependencies, when cloning coreboot.** We
|
||||
previously relied on the coreboot build system, which automatically fetches
|
||||
|
|
@ -191,8 +189,7 @@ Feature changes
|
|||
* Removed all status checks from script/roms (formerly script/build/roms),
|
||||
because it's better to document this instead, and rely on testing regardless.
|
||||
|
||||
Bug fixes
|
||||
---------
|
||||
### Bug fixes
|
||||
|
||||
Some of these changes fix actual issues that were found in testing, while
|
||||
others were fixed *before* being triggered/reported and are thus *preventative
|
||||
|
|
@ -405,8 +402,7 @@ The changes are, from newest to earliest:
|
|||
* Main build script: exit (with error status) if not running directly from
|
||||
the root of the cbmk work directory.
|
||||
|
||||
General code cleanup
|
||||
--------------------
|
||||
### General code cleanup
|
||||
|
||||
In addition to *general* very sweeping code cleanup, condensing code lines
|
||||
where possible and so on:
|
||||
|
|
@ -523,13 +519,12 @@ where possible and so on:
|
|||
* script/build/roms: split up `main()` into multiple smaller functions
|
||||
|
||||
Revision updates
|
||||
================
|
||||
----------------
|
||||
|
||||
Some revisions were updated as part of standard routine, but happened to be
|
||||
done during this audit. Those updates are as follows:
|
||||
|
||||
SeaBIOS
|
||||
-------
|
||||
### SeaBIOS
|
||||
|
||||
Bump SeaBIOS to revision `e5f2e4c69643bc3cd385306a9e5d29e11578148c`, which has
|
||||
these changes relative to the old one:
|
||||
|
|
@ -559,8 +554,7 @@ these changes relative to the old one:
|
|||
* a6ed6b70 limit address space used for pci devices.
|
||||
```
|
||||
|
||||
Flashprog
|
||||
---------
|
||||
### Flashprog
|
||||
|
||||
Updated to revision 5b4fdd1 from 2 May 2024, rebasing the MX workaround patch.
|
||||
|
||||
|
|
@ -631,7 +625,7 @@ Flashrom, lead by Nico Huber after a dispute with the new leadership of
|
|||
Flashrom, and it was felt that Flashprog is a better choice for Canoeboot.
|
||||
|
||||
Git log
|
||||
=======
|
||||
-------
|
||||
|
||||
This entire set of changelogs is based on the precise Git history in cbmk,
|
||||
relative to Canoeboot 20240504 which is from where the audit began.
|
||||
|
|
|
|||
|
|
@ -5,8 +5,8 @@
|
|||
Heavy amount of code reduction in this audit, and general cleanup. A new
|
||||
Canoeboot release is planned, for the early days of August 2024.
|
||||
|
||||
Introduction
|
||||
============
|
||||
Free as in freedom!
|
||||
--------------------
|
||||
|
||||
Canoeboot is a free/opensource boot firmware project. It replaces your
|
||||
proprietary BIOS/UEFI firmware, on supported x86 and ARM computers. It does
|
||||
|
|
|
|||
|
|
@ -7,8 +7,8 @@ a de-blobbed configuration on *fewer mainboards*; Libreboot supports more
|
|||
hardware, and much newer hardware. More information can be found on Canoeboot's
|
||||
[about](../about.html) page and by reading Libreboot's [Binary Blob Reduction Policy](https://libreboot.org/news/policy.html).
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
-----------------------------
|
||||
|
||||
*This* new release, Canoeboot 20231026, released today 26 October 2023, is
|
||||
based on [Libreboot 20231021](https://libreboot.org/news/libreboot20231021.html).
|
||||
|
|
@ -44,7 +44,7 @@ Libreboot supports *a lot more hardware*, but Canoeboot is provided for the
|
|||
purists out there who are OK using slightly older hardware as a result.
|
||||
|
||||
Work done since last release
|
||||
============================
|
||||
----------------------------
|
||||
|
||||
Canoeboot is a *special fork* of Libreboot, maintained in parallel by the
|
||||
Canoeboot [removes all binary blobs](policy.md) from coreboot, unlike
|
||||
|
|
@ -60,8 +60,7 @@ things like memory controller initialisation. Canoeboot is provided for purists
|
|||
who only want free software; it even removes CPU microcode updates, regardless
|
||||
of the negative impact this has on system stability.
|
||||
|
||||
GRUB LUKS2 now supported (with argon2 key derivation)
|
||||
---------------------------------------------------
|
||||
### GRUB LUKS2 now supported (with argon2 key derivation)
|
||||
|
||||
*This* new Canoeboot release imports the [PHC argon2
|
||||
implementation](https://github.com/P-H-C/phc-winner-argon2) into GRUB,
|
||||
|
|
@ -84,15 +83,13 @@ in this 20231026 release:
|
|||
This means that you can now boot from encrypted `/boot` partitions. I'm very
|
||||
grateful to everyone who made this possible!
|
||||
|
||||
Simplified commands (build system)
|
||||
-------------------------
|
||||
### Simplified commands (build system)
|
||||
|
||||
You can find information about *using* the build system in
|
||||
the [Canoeboot build instructions](../docs/build/) and in the [cbmk
|
||||
maintenance manual](../docs/maintain/).
|
||||
|
||||
TWO massive audits. 50% code size reduction in cbmk.
|
||||
--------------------------------------------
|
||||
### TWO massive audits. 50% code size reduction in cbmk.
|
||||
|
||||
Canoeboot's build system, cbmk, is written entirely in shell scripts. It is
|
||||
an automatic build system that downloads, patches, configures and compiles
|
||||
|
|
@ -109,8 +106,7 @@ Changes include things like vastly reduced code complexity (while not
|
|||
sacrificing functionality), greater speed (at compiling, and boot speeds are
|
||||
higher when you use the GRUB payload), many bug fixes and more.
|
||||
|
||||
Serprog firmware building (RP2040 and STM32)
|
||||
-----------------------------------
|
||||
### Serprog firmware building (RP2040 and STM32)
|
||||
|
||||
In addition to coreboot firmware, the Canoeboot build system (cbmk) can now
|
||||
build *serprog* firmware, specifically `pico-serprog` and `stm32-vserprog`, on
|
||||
|
|
@ -124,8 +120,7 @@ Pre-compiled firmware images are available, for many of these devices, under
|
|||
the `roms/` directory in this Canoeboot 20231026 release! Riku Viitanen is the
|
||||
one who added this capability to Libreboot, which was then ported to Canoeboot.
|
||||
|
||||
Updated U-Boot revision (2023.10)
|
||||
----------------------------
|
||||
### Updated U-Boot revision (2023.10)
|
||||
|
||||
Alper Nebi Yasak submitted patches that update the U-Boot revision in
|
||||
Libreboot, on `gru_bob` and `gru_kevin` chromebooks. Additionally, the `cros`
|
||||
|
|
@ -152,8 +147,7 @@ reading these diffs:
|
|||
|
||||
All of these patches have been ported to this Canoeboot release.
|
||||
|
||||
Coreboot, GRUB, U-Boot and SeaBIOS revisions
|
||||
------------------------------------
|
||||
### Coreboot, GRUB, U-Boot and SeaBIOS revisions
|
||||
|
||||
In Canoeboot 20231026 (*this release*):
|
||||
|
||||
|
|
@ -165,10 +159,9 @@ In Canoeboot 20231026 (*this release*):
|
|||
* U-Boot: commit ID `4459ed60cb1e0562bc5b40405e2b4b9bbf766d57`, 2 October 2023
|
||||
|
||||
Build system tweaks
|
||||
===================
|
||||
-------------------
|
||||
|
||||
resources/ now config/
|
||||
----------------------
|
||||
### resources/ now config/
|
||||
|
||||
The `resources/scripts/` directory is now `script/`, and what was `resources/`
|
||||
now only contains configuration data plus code patches for various projects,
|
||||
|
|
@ -181,8 +174,7 @@ always be ge-generated if the user wants to, using ich9gen, or using a
|
|||
combination of bincfg and ifdtool from coreboot, and nvmutil (to change the
|
||||
mac address) from Canoeboot or Libreboot.
|
||||
|
||||
Full list of changes (detail)
|
||||
--------------------
|
||||
### Full list of changes (detail)
|
||||
|
||||
These changes have been ported from the Libreboot 20231021 release, which are
|
||||
mostly the results of the two audits (mentioned above):
|
||||
|
|
@ -443,7 +435,7 @@ mostly the results of the two audits (mentioned above):
|
|||
not cleanly handle `/tmp` at all, but now it's pretty reliable.
|
||||
|
||||
Hardware supported in this release
|
||||
==================================
|
||||
----------------------------------
|
||||
|
||||
All of the following are believed to *boot*, but if you have any issues,
|
||||
please contact the Canoeboot project. They are:
|
||||
|
|
@ -453,8 +445,7 @@ please contact the Canoeboot project. They are:
|
|||
- [ASUS KFSN4-DRE motherboard](../docs/hardware/kfsn4-dre.md)
|
||||
- [ASUS KGPE-D16 motherboard](../docs/hardware/kgpe-d16.md)
|
||||
|
||||
Desktops (AMD, Intel, x86)
|
||||
-----------------------
|
||||
### Desktops (AMD, Intel, x86)
|
||||
|
||||
- [Gigabyte GA-G41M-ES2L motherboard](../docs/hardware/ga-g41m-es2l.md)
|
||||
- [Acer G43T-AM3](../docs/hardware/acer_g43t-am3.md)
|
||||
|
|
@ -483,14 +474,14 @@ Desktops (AMD, Intel, x86)
|
|||
- [Samsung Chromebook Plus (v1) (gru-kevin)](../docs/install/chromebooks.md)
|
||||
|
||||
Downloads
|
||||
=========
|
||||
---------
|
||||
|
||||
You can find this release on the downloads page. At the time of this
|
||||
announcement, some of the rsync mirrors may not have it yet, so please check
|
||||
another one if your favourite one doesn't have it.
|
||||
|
||||
Special changes
|
||||
===============
|
||||
---------------
|
||||
|
||||
Besides deblobbing, there are two critical differences in how Canoeboot's
|
||||
build system works in this release, versus the Libreboot 20231021 build system:
|
||||
|
|
@ -515,7 +506,7 @@ with). The build system in Canoeboot 20231026 is *[extremely
|
|||
efficient](../docs/maintain/)*.
|
||||
|
||||
Backports
|
||||
=========
|
||||
--------
|
||||
|
||||
In addition to the Libreboot 20231021 changes, the following Libreboot patches
|
||||
were backported into this Canoeboot release, from Libreboot revisions pushed
|
||||
|
|
@ -532,7 +523,7 @@ after the Libreboot 20231021 release came out:
|
|||
* <https://browse.libreboot.org/lbmk.git/commit/?id=5f6ba01d414e2d98d7db049347b8c5c5d125ba61>
|
||||
|
||||
Excluded mainboards
|
||||
===================
|
||||
-------------------
|
||||
|
||||
The following boards are *missing* in Canoeboot 20231026, but are supported in
|
||||
the Libreboot 20231021 release:
|
||||
|
|
@ -558,7 +549,7 @@ the Libreboot 20231021 release:
|
|||
* Lenovo ThinkPad X230/X230T
|
||||
|
||||
Post-release errata
|
||||
===================
|
||||
-------------------
|
||||
|
||||
The following binary blobs were overlooked, and are still present in the
|
||||
release archive for Canoeboot 20231101 and 20231026; this mistake was
|
||||
|
|
@ -598,8 +589,7 @@ people know of the above issue.
|
|||
You are advised, therefore, to use the [Canoeboot 20231103
|
||||
release](canoeboot20231103.md).
|
||||
|
||||
Update on 12 November 2023:
|
||||
---------------------------
|
||||
### Update on 12 November 2023:
|
||||
|
||||
This file was also overlooked, and is still present in the release tarball:
|
||||
|
||||
|
|
|
|||
|
|
@ -7,8 +7,8 @@ a de-blobbed configuration on *fewer mainboards*; Libreboot supports more
|
|||
hardware, and much newer hardware. More information can be found on Canoeboot's
|
||||
[about](../about.html) page and by reading Libreboot's [Binary Blob Reduction Policy](https://libreboot.org/news/policy.html).
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
---------------------------
|
||||
|
||||
*This* new release, Canoeboot 20231101, released today 1 November 2023, is
|
||||
based on the [Libreboot 20231101](https://libreboot.org/news/libreboot20231101.html) release, porting changes in it on top of
|
||||
|
|
@ -46,15 +46,14 @@ Libreboot supports *a lot more hardware*, but Canoeboot is provided for the
|
|||
purists out there who are OK using slightly older hardware as a result.
|
||||
|
||||
Work done since last release
|
||||
============================
|
||||
---------------------------
|
||||
|
||||
This changelog is based on the Libreboot 20231101 changelog; changes from
|
||||
Libreboot 20231101 that are suitable for Canoeboot have been included in
|
||||
this release, and so, this changelog has been modified (based on the
|
||||
Libreboot one):
|
||||
|
||||
Coreboot, GRUB, U-Boot and SeaBIOS revisions
|
||||
------------------------------------
|
||||
### Coreboot, GRUB, U-Boot and SeaBIOS revisions
|
||||
|
||||
Canoeboot 20231026 and 20231101 are both based on these revisions:
|
||||
|
||||
|
|
@ -69,7 +68,7 @@ of these, that fix certain bugs or improve certain functionalities. More
|
|||
information is available elsewhere in this page.
|
||||
|
||||
Build system tweaks
|
||||
===================
|
||||
------------------
|
||||
|
||||
These changes were made:
|
||||
|
||||
|
|
@ -105,7 +104,7 @@ This is only about 1 week's worth of changes; this Canoeboot release is
|
|||
largely a bugfix release.
|
||||
|
||||
Hardware supported in this release
|
||||
==================================
|
||||
---------------------------------
|
||||
|
||||
All of the following are believed to *boot*, but if you have any issues,
|
||||
please contact the Canoeboot project. They are:
|
||||
|
|
@ -115,8 +114,7 @@ please contact the Canoeboot project. They are:
|
|||
- [ASUS KFSN4-DRE motherboard](../docs/hardware/kfsn4-dre.md)
|
||||
- [ASUS KGPE-D16 motherboard](../docs/hardware/kgpe-d16.md)
|
||||
|
||||
Desktops (AMD, Intel, x86)
|
||||
-----------------------
|
||||
### Desktops (AMD, Intel, x86)
|
||||
|
||||
- [Gigabyte GA-G41M-ES2L motherboard](../docs/hardware/ga-g41m-es2l.md)
|
||||
- [Acer G43T-AM3](../docs/hardware/acer_g43t-am3.md)
|
||||
|
|
@ -146,14 +144,14 @@ Desktops (AMD, Intel, x86)
|
|||
- [Samsung Chromebook Plus (v1) (gru-kevin)](../docs/install/chromebooks.md)
|
||||
|
||||
Downloads
|
||||
=========
|
||||
---------
|
||||
|
||||
You can find this release on the downloads page. At the time of this
|
||||
announcement, some of the rsync mirrors may not have it yet, so please check
|
||||
another one if your favourite one doesn't have it.
|
||||
|
||||
Post-release errata
|
||||
===================
|
||||
-------------------
|
||||
|
||||
The following binary blobs were overlooked, and are still present in the
|
||||
release archive for Canoeboot 20231101 and 20231026; this mistake was
|
||||
|
|
@ -193,8 +191,7 @@ people know of the above issue.
|
|||
You are advised, therefore, to use the [Canoeboot 20231103
|
||||
release](canoeboot20231103.md).
|
||||
|
||||
Update on 12 November 2023:
|
||||
---------------------------
|
||||
### Update on 12 November 2023:
|
||||
|
||||
This file was also overlooked, and is still present in the release tarball:
|
||||
|
||||
|
|
|
|||
|
|
@ -7,8 +7,8 @@ a de-blobbed configuration on *fewer mainboards*; Libreboot supports more
|
|||
hardware, and much newer hardware. More information can be found on Canoeboot's
|
||||
[about](../about.html) page and by reading Libreboot's [Binary Blob Reduction Policy](https://libreboot.org/news/policy.html).
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
----------------------------
|
||||
|
||||
*This* new release, Canoeboot 20231103, released today 3 November 2023, is
|
||||
based on the [Canoeboot 20231101](https://canoeboot.org/news/canoeboot20231101.html)
|
||||
|
|
@ -47,7 +47,7 @@ Libreboot supports *a lot more hardware*, but Canoeboot is provided for the
|
|||
purists out there who are OK using slightly older hardware as a result.
|
||||
|
||||
Work done since last release
|
||||
============================
|
||||
----------------------------
|
||||
|
||||
There have been no code changes whatsoever, on any of the current builds, but
|
||||
a major oversight has been corrected.
|
||||
|
|
@ -89,7 +89,7 @@ people know of the above issue.
|
|||
Those files, listed above, have been removed in today's release.
|
||||
|
||||
Hardware supported in this release
|
||||
==================================
|
||||
------------------------------------
|
||||
|
||||
All of the following are believed to *boot*, but if you have any issues,
|
||||
please contact the Canoeboot project. They are:
|
||||
|
|
@ -99,8 +99,7 @@ please contact the Canoeboot project. They are:
|
|||
- [ASUS KFSN4-DRE motherboard](../docs/hardware/kfsn4-dre.md)
|
||||
- [ASUS KGPE-D16 motherboard](../docs/hardware/kgpe-d16.md)
|
||||
|
||||
Desktops (AMD, Intel, x86)
|
||||
-----------------------
|
||||
### Desktops (AMD, Intel, x86)
|
||||
|
||||
- [Gigabyte GA-G41M-ES2L motherboard](../docs/hardware/ga-g41m-es2l.md)
|
||||
- [Acer G43T-AM3](../docs/hardware/acer_g43t-am3.md)
|
||||
|
|
@ -130,17 +129,16 @@ Desktops (AMD, Intel, x86)
|
|||
- [Samsung Chromebook Plus (v1) (gru-kevin)](../docs/install/chromebooks.md)
|
||||
|
||||
Downloads
|
||||
=========
|
||||
---------
|
||||
|
||||
You can find this release on the downloads page. At the time of this
|
||||
announcement, some of the rsync mirrors may not have it yet, so please check
|
||||
another one if your favourite one doesn't have it.
|
||||
|
||||
Errata
|
||||
======
|
||||
------
|
||||
|
||||
Update on 12 November 2023:
|
||||
---------------------------
|
||||
### Update on 12 November 2023:
|
||||
|
||||
This file was also overlooked, and is still present in the release tarball:
|
||||
|
||||
|
|
|
|||
|
|
@ -7,8 +7,8 @@ a de-blobbed configuration on *fewer mainboards*; Libreboot supports more
|
|||
hardware, and much newer hardware. More information can be found on Canoeboot's
|
||||
[about](../about.html) page and by reading Libreboot's [Binary Blob Reduction Policy](https://libreboot.org/news/policy.html).
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
*This* new release, Canoeboot 20231107, released today 7 November 2023, is
|
||||
based on the recent [Libreboot 20231106](https://libreboot.org/news/libreboot20231106.html) release.
|
||||
|
|
@ -41,13 +41,12 @@ firmware, but not Canoeboot! Booting Linux/BSD is also [well](../docs/linux/)
|
|||
[supported](../docs/bsd/).
|
||||
|
||||
Work done since last release
|
||||
============================
|
||||
---------------------------
|
||||
|
||||
This is largely a bugfix release. Most notably, boot issues on GM45 thinkpads
|
||||
present in the 20231103 release have been resolved.
|
||||
|
||||
Dell E6400 on its own tree
|
||||
-----------------------------
|
||||
### Dell E6400 on its own tree
|
||||
|
||||
Canoeboot contains a DDR2 raminit patch for Dell Latitude E6400, that increases
|
||||
reliability on coldboot, but it negatively affects other GM45 machines that use
|
||||
|
|
@ -65,8 +64,7 @@ from those release archives). Today's Canoeboot release solves that problem,
|
|||
so these machines can be used reliably once again (and ROM images are provided,
|
||||
in this Canoeboot 20231107 release).
|
||||
|
||||
Coreboot, GRUB, U-Boot and SeaBIOS revisions
|
||||
------------------------------------
|
||||
### Coreboot, GRUB, U-Boot and SeaBIOS revisions
|
||||
|
||||
Canoeboot 20231107 and 20231103 are both based on these revisions:
|
||||
|
||||
|
|
@ -82,7 +80,7 @@ Several other fixes and tweaks have been made, in addition to this and the
|
|||
E6400 patch mentioned above.
|
||||
|
||||
Build system tweaks
|
||||
===================
|
||||
----------------
|
||||
|
||||
These changes were made:
|
||||
|
||||
|
|
@ -126,7 +124,7 @@ f12f5c3a nvmutil: fix makefile
|
|||
This is a very conservative changelog, because this is largely a bugfix release.
|
||||
|
||||
Hardware supported in this release
|
||||
==================================
|
||||
--------------------------------
|
||||
|
||||
All of the following are believed to *boot*, but if you have any issues,
|
||||
please contact the Canoeboot project. They are:
|
||||
|
|
@ -136,8 +134,7 @@ please contact the Canoeboot project. They are:
|
|||
- [ASUS KFSN4-DRE motherboard](../docs/hardware/kfsn4-dre.md)
|
||||
- [ASUS KGPE-D16 motherboard](../docs/hardware/kgpe-d16.md)
|
||||
|
||||
Desktops (AMD, Intel, x86)
|
||||
-----------------------
|
||||
### Desktops (AMD, Intel, x86)
|
||||
|
||||
- [Gigabyte GA-G41M-ES2L motherboard](../docs/hardware/ga-g41m-es2l.md)
|
||||
- [Acer G43T-AM3](../docs/hardware/acer_g43t-am3.md)
|
||||
|
|
@ -167,17 +164,16 @@ Desktops (AMD, Intel, x86)
|
|||
- [Samsung Chromebook Plus (v1) (gru-kevin)](../docs/install/chromebooks.md)
|
||||
|
||||
Downloads
|
||||
=========
|
||||
---------
|
||||
|
||||
You can find this release on the downloads page. At the time of this
|
||||
announcement, some of the rsync mirrors may not have it yet, so please check
|
||||
another one if your favourite one doesn't have it.
|
||||
|
||||
Errata
|
||||
======
|
||||
------
|
||||
|
||||
Update on 12 November 2023:
|
||||
---------------------------
|
||||
### Update on 12 November 2023:
|
||||
|
||||
This file was also overlooked, and is still present in the release tarball:
|
||||
|
||||
|
|
|
|||
|
|
@ -10,8 +10,8 @@ hardware, and much newer hardware. More information can be found on Canoeboot's
|
|||
**Do not use the Canoeboot 20240504 release, because it had problems with it.
|
||||
Please use the [Canoeboot 20240612 release](canoeboot20240612.md) instead.**
|
||||
|
||||
Introduction
|
||||
============
|
||||
Free software BIOS/UEFI
|
||||
------------------------
|
||||
|
||||
Canoeboot is a free/libre BIOS/UEFI replacement on x86 and ARM, providing
|
||||
boot firmware that initialises the hardware in your computer, to then load an
|
||||
|
|
@ -67,7 +67,7 @@ Your computer is *your property* to use as you wish. Free Software protects you,
|
|||
by ensuring that you always have control of the machine.
|
||||
|
||||
Hardware supported in this release
|
||||
==================================
|
||||
---------------------------------
|
||||
|
||||
This release supports the following hardware:
|
||||
|
||||
|
|
@ -105,17 +105,15 @@ This release supports the following hardware:
|
|||
- [Samsung Chromebook Plus (v1) (gru-kevin)](../docs/install/chromebooks.md)
|
||||
|
||||
Highlights
|
||||
==========
|
||||
-----------
|
||||
|
||||
S3 fixed on GM45 thinkpads
|
||||
-----------------------
|
||||
### S3 fixed on GM45 thinkpads
|
||||
|
||||
This was broken in the previous Canoeboot release, but now it works again.
|
||||
|
||||
S3 suspend/resume (when you put the laptop to sleep and later wake it up).
|
||||
|
||||
Modest code size reduction
|
||||
--------------------------
|
||||
### Modest code size reduction
|
||||
|
||||
See: [Libreboot build system audit 4](https://libreboot.org/news/audit4.html)
|
||||
|
||||
|
|
@ -138,15 +136,13 @@ things like memory controller initialisation. Canoeboot is provided for purists
|
|||
who only want free software; it even removes CPU microcode updates, regardless
|
||||
of the negative impact this has on system stability.
|
||||
|
||||
GRUB 2.12 revision now used
|
||||
---------------------------
|
||||
### GRUB 2.12 revision now used
|
||||
|
||||
The previous Canoeboot release used a revision from GRUB 2.12-rc1, but now
|
||||
it uses the GRUB 2.12 released during December 2023, with some additional
|
||||
revisions and patches on top of that.
|
||||
|
||||
GRUB support for EFI System Partition
|
||||
-------------------------------------
|
||||
### GRUB support for EFI System Partition
|
||||
|
||||
We don't use UEFI on x86, but the GRUB config in Canoeboot's GRUB payload
|
||||
has now been modified, to also scan `grub.cfg` from `EFI/` directories.
|
||||
|
|
@ -160,8 +156,7 @@ installers (e.g. USB media). Syslinux/Extlinux/GRUB config scanning has been
|
|||
merged together there, so now a lot more distro installers should boot
|
||||
automatically, without manual tweaking/intervention from the user.
|
||||
|
||||
U-Boot release script
|
||||
---------------------
|
||||
### U-Boot release script
|
||||
|
||||
The script at `script/update/release` now supports generating standalone
|
||||
U-Boot source archives, like so:
|
||||
|
|
@ -173,8 +168,7 @@ than `release/`. Canoeboot still provides U-Boot embedded within the larger
|
|||
source release archive, and does not yet actually provide U-Boot as a
|
||||
standalone project, but some people may find this useful.
|
||||
|
||||
Flashprog now used, not flashrom
|
||||
---------------------------
|
||||
### Flashprog now used, not flashrom
|
||||
|
||||
Essentially, flashprog has better leadership and is more stable than flashrom;
|
||||
flashrom has had new leadership for a while now, and in my view they are not
|
||||
|
|
@ -190,7 +184,7 @@ stable.
|
|||
Canoeboot will use flashprog from now on, not flashrom.
|
||||
|
||||
Work done since Canoeboot 20231107
|
||||
============================
|
||||
---------------------------
|
||||
|
||||
The following log will now acount for changes since Canoeboot 20231107, from
|
||||
most recent descending to very earliest commits. The most interesting changes
|
||||
|
|
@ -476,7 +470,7 @@ are highlighted in bold:
|
|||
properly formatted to include `nvmutil.c`, when running make-all.
|
||||
|
||||
Disabled boards
|
||||
===============
|
||||
-------------
|
||||
|
||||
Canoeboot's build system can be configured to exclude certain boards in
|
||||
release archives, while still permitting them to be re-built.
|
||||
|
|
@ -488,7 +482,7 @@ D510MO and D945GCLF images not included either, due to lack of testing.
|
|||
*All other boards have ROM images in this release.*
|
||||
|
||||
Errata
|
||||
======
|
||||
----
|
||||
|
||||
See: <https://codeberg.org/libreboot/lbmk/issues/216>
|
||||
|
||||
|
|
|
|||
|
|
@ -10,8 +10,8 @@ hardware, and much newer hardware. More information can be found on Canoeboot's
|
|||
**Do not use the Canoeboot 20240510 release, because it had problems with it.
|
||||
Please use the [Canoeboot 20240612 release](canoeboot20240612.md) instead.**
|
||||
|
||||
Introduction
|
||||
============
|
||||
Free software BIOS/UEFI
|
||||
----------------------
|
||||
|
||||
Canoeboot is a [free/libre](https://writefreesoftware.org/) BIOS/UEFI replacement
|
||||
on x86 and ARM, providing
|
||||
|
|
@ -55,7 +55,7 @@ changes; if you already installed Canoeboot 20240504, you probably don't need
|
|||
to update, but the *SeaBIOS* revision was updated, and has some fixes.
|
||||
|
||||
Changes in this release
|
||||
=======================
|
||||
----------------------
|
||||
|
||||
*Extensive* changes have been made to the documentation and website!
|
||||
|
||||
|
|
@ -63,8 +63,7 @@ Very large and sweeping changes.
|
|||
|
||||
ALSO:
|
||||
|
||||
Build system changes
|
||||
-------------------
|
||||
### Build system changes
|
||||
|
||||
The following improvements have been made, most of them not affecting the
|
||||
final build (the actual code that goes in-flash):
|
||||
|
|
@ -113,7 +112,7 @@ to update to today's release. If you *didn't* install 20240504, then you may
|
|||
aswell update to today's release (Canoeboot 20240510).
|
||||
|
||||
Hardware supported in this release
|
||||
==================================
|
||||
--------------------------
|
||||
|
||||
This release supports the following hardware:
|
||||
|
||||
|
|
@ -156,7 +155,7 @@ the last Canoeboot release, so I decided to another quick one.
|
|||
That is all.
|
||||
|
||||
Errata
|
||||
======
|
||||
-----
|
||||
|
||||
See: <https://codeberg.org/libreboot/lbmk/issues/216>
|
||||
|
||||
|
|
|
|||
|
|
@ -7,8 +7,8 @@ a de-blobbed configuration on *fewer mainboards*; Libreboot supports more
|
|||
hardware, and much newer hardware. More information can be found on Canoeboot's
|
||||
[about](../about.html) page and by reading Libreboot's [Binary Blob Reduction Policy](https://libreboot.org/news/policy.html).
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
-----------------------------
|
||||
|
||||
Canoeboot is a free/libre BIOS/UEFI replacement on x86 and ARM, providing
|
||||
boot firmware that initialises the hardware in your computer, to then load an
|
||||
|
|
@ -46,7 +46,7 @@ announcement for Canoeboot 20240612 is in reference to 20240504, *not* 20240510,
|
|||
so it also includes changes from the 20240510 release, with fixes made after it.
|
||||
|
||||
Changes since Audit 1
|
||||
=====================
|
||||
--------------------
|
||||
|
||||
Audit 1 was only recent, and forms most of the changes in this release, so look
|
||||
further down for a list of those changes or read [the audit 1 page](audit1.md).
|
||||
|
|
@ -72,13 +72,12 @@ precisely to avoid any potential issues if a board doesn't need it. The NVMe
|
|||
patch has been extensively tested, on all of the boards that actually have it.
|
||||
|
||||
Audit 1 changes
|
||||
===============
|
||||
---------------
|
||||
|
||||
Since the recent audit 1 changes are included in this release, the changelog
|
||||
of that audit has simply been copied for sake of efficiency. Firstly:
|
||||
|
||||
Modest code size reduction
|
||||
--------------------------
|
||||
### Modest code size reduction
|
||||
|
||||
There are 1054 lines of shell script in the build system, versus 1208 in the
|
||||
Canoeboot 20240504 release. Canoeboot's build system is written purely in
|
||||
|
|
@ -88,12 +87,11 @@ This is a difference of 154 lines, or a 13% reduction. Despite the reduction,
|
|||
numerous features have been added and a large number of bugs were fixed.
|
||||
|
||||
Summarised list of changes
|
||||
==========================
|
||||
--------------------------
|
||||
|
||||
Changes are in order per category, from newest to oldest:
|
||||
|
||||
Feature changes
|
||||
---------------
|
||||
### Feature changes
|
||||
|
||||
* **Download crossgcc tarballs as dependencies, when cloning coreboot.** We
|
||||
previously relied on the coreboot build system, which automatically fetches
|
||||
|
|
@ -217,8 +215,7 @@ Feature changes
|
|||
* Removed all status checks from script/roms (formerly script/build/roms),
|
||||
because it's better to document this instead, and rely on testing regardless.
|
||||
|
||||
Bug fixes
|
||||
---------
|
||||
### Bug fixes
|
||||
|
||||
Some of these changes fix actual issues that were found in testing, while
|
||||
others were fixed *before* being triggered/reported and are thus *preventative
|
||||
|
|
@ -431,8 +428,7 @@ The changes are, from newest to earliest:
|
|||
* Main build script: exit (with error status) if not running directly from
|
||||
the root of the cbmk work directory.
|
||||
|
||||
General code cleanup
|
||||
--------------------
|
||||
### General code cleanup
|
||||
|
||||
In addition to *general* very sweeping code cleanup, condensing code lines
|
||||
where possible and so on:
|
||||
|
|
@ -549,13 +545,12 @@ where possible and so on:
|
|||
* script/build/roms: split up `main()` into multiple smaller functions
|
||||
|
||||
Revision updates
|
||||
================
|
||||
----------------
|
||||
|
||||
Some revisions were updated as part of standard routine, but happened to be
|
||||
done during this audit. Those updates are as follows:
|
||||
|
||||
SeaBIOS
|
||||
-------
|
||||
### SeaBIOS
|
||||
|
||||
Bump SeaBIOS to revision `e5f2e4c69643bc3cd385306a9e5d29e11578148c`, which has
|
||||
these changes relative to the old one:
|
||||
|
|
@ -585,8 +580,7 @@ these changes relative to the old one:
|
|||
* a6ed6b70 limit address space used for pci devices.
|
||||
```
|
||||
|
||||
Flashprog
|
||||
---------
|
||||
### Flashprog
|
||||
|
||||
Updated to revision 5b4fdd1 from 2 May 2024, rebasing the MX workaround patch.
|
||||
|
||||
|
|
@ -657,7 +651,7 @@ Flashrom, lead by Nico Huber after a dispute with the new leadership of
|
|||
Flashrom, and it was felt that Flashprog is a better choice for Canoeboot.
|
||||
|
||||
Git log
|
||||
=======
|
||||
------
|
||||
|
||||
This entire set of changelogs is based on the precise Git history in cbmk,
|
||||
relative to Canoeboot 20240504 which is from where the audit began.
|
||||
|
|
|
|||
|
|
@ -7,8 +7,8 @@ a de-blobbed configuration on *fewer mainboards*; Libreboot supports more
|
|||
hardware, and much newer hardware. More information can be found on Canoeboot's
|
||||
[about](../about.html) page and by reading Libreboot's [Binary Blob Reduction Policy](https://libreboot.org/news/policy.html).
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
--------------------------
|
||||
|
||||
Canoeboot is a free/libre BIOS/UEFI replacement on x86 and ARM, providing
|
||||
boot firmware that initialises the hardware in your computer, to then load an
|
||||
|
|
@ -26,12 +26,11 @@ or [GRUB](https://www.gnu.org/software/grub/) to boot your operating
|
|||
system; on ARM(chromebooks), we provide *U-Boot* (as a coreboot payload).
|
||||
|
||||
Summarised list of changes
|
||||
==========================
|
||||
--------------------------
|
||||
|
||||
Changes are in order per category, from newest to oldest:
|
||||
|
||||
Board support
|
||||
-------------
|
||||
### Board support
|
||||
|
||||
The following boards have been added since the Canoeboot 20240612 release:
|
||||
|
||||
|
|
@ -46,8 +45,7 @@ modified Intel Flash Descriptors similar to that seen on ThinkPad X200/T400.
|
|||
|
||||
E4300 has the same installation procedure as the E6400.
|
||||
|
||||
About the PlayStation BIOS
|
||||
--------------------------
|
||||
### About the PlayStation BIOS
|
||||
|
||||
This is *not* coreboot, but it is a fully free/opensource BIOS with source code
|
||||
under MIT license, provided by
|
||||
|
|
@ -63,8 +61,7 @@ other modifications, it basically becomes a very hackable classic 90s computer,
|
|||
that also happens to play games. More info is on the Libreboot page about it,
|
||||
linked above.
|
||||
|
||||
Feature changes
|
||||
---------------
|
||||
### Feature changes
|
||||
|
||||
Some unused features have been removed, and yet more added. The overall focus of
|
||||
Audit 2 has been to remove legacy cruft from cbmk, and in general to simplify
|
||||
|
|
@ -263,8 +260,7 @@ The changes are as follows:
|
|||
avoiding such configurations. NOTE: This issue never affected *Canoeboot*,
|
||||
but Canoeboot keeps in sync with Libreboot where possible.
|
||||
|
||||
Configuration changes
|
||||
---------------------
|
||||
### Configuration changes
|
||||
|
||||
This pertains to anything under `config/`, for any changes that are of note,
|
||||
but it does not pertain to *revisions* for specific projects, nor does it
|
||||
|
|
@ -323,8 +319,7 @@ The changes are as follows:
|
|||
which is loaded per-project on multi-tree projects, before each target
|
||||
file. It allows easier configuration tree-wide on multi-tree projects.
|
||||
|
||||
Bug fixes
|
||||
---------
|
||||
### Bug fixes
|
||||
|
||||
There are fewer *acute* bug fixes in Audit 2, because bugfixes was the primary
|
||||
focus of *Audit 1*. The word *acute* is used, referring to triggered bugs, because
|
||||
|
|
@ -501,8 +496,7 @@ The changes are as follows:
|
|||
could create situations where the user can longer run cbmk without intervention
|
||||
such as changing permission on certain files. Avoid the issue entirely.
|
||||
|
||||
General code cleanup
|
||||
--------------------
|
||||
### General code cleanup
|
||||
|
||||
Extensive code cleanup has been performed, as was the main purpose of Audit 2.
|
||||
|
||||
|
|
@ -778,10 +772,9 @@ The changes are as follows:
|
|||
* `script/roms`: shorter variable names, condensed several functions.
|
||||
|
||||
Revision updates
|
||||
================
|
||||
----------------
|
||||
|
||||
Coreboot
|
||||
--------
|
||||
### Coreboot
|
||||
|
||||
The `default` tree was updated to commit ID `97bc693ab` from 29 July 2024.
|
||||
Several patches were merged upstream and therefore no longer needed in cbmk.
|
||||
|
|
@ -798,8 +791,7 @@ a single `fam15h` tree. This contains the ASUS KGPE-D16 and KCMA-D8 ports,
|
|||
based on coreboot's `4.11_branch` tree, with Canoeboot's special build fixes
|
||||
that make it compile on modern distros, such as Debian Sid or Arch.
|
||||
|
||||
U-Boot
|
||||
------
|
||||
### U-Boot
|
||||
|
||||
Alper Nebi Yasak is the maintainer of U-Boot, within *Libreboot*, and a Libreboot
|
||||
patch of his updated U-Boot to v2024.07, on the `gru_bob` and `gru_kevin`
|
||||
|
|
@ -813,20 +805,17 @@ boards, but revision updates will be done *immediately after* Audit 2
|
|||
is announced, as a priority for further work that is to be completed for
|
||||
the next Canoeboot release, ETA August 2024.
|
||||
|
||||
GRUB
|
||||
----
|
||||
### GRUB
|
||||
|
||||
Updated the revision to commit ID b53ec06a1 from 17 June 2024. This fixes
|
||||
several bugs in the LUKS implementation. Several virtual memory fixes, and
|
||||
numerous fixes to file system drivers in the GRUB kernel.
|
||||
|
||||
Flashprog
|
||||
---------
|
||||
### Flashprog
|
||||
|
||||
Updated the revision to commit ID `639d563` from 2 August 2024.
|
||||
|
||||
PCSX Redux
|
||||
----------
|
||||
### PCSX Redux
|
||||
|
||||
This was added git commit ID `6ec5348058413619b290b069adbdae68180ce8c0`. It is
|
||||
a *Sony PlayStation* emulator, but we only need one part of it: the BIOS.
|
||||
|
|
@ -838,7 +827,7 @@ the open BIOS image, which is compatible with every PlayStation emulator and
|
|||
also real PlayStations (soldering required).
|
||||
|
||||
Git log
|
||||
=======
|
||||
--------
|
||||
|
||||
This git log covers all changes in this audit, relative to Canoeboot 20240612.
|
||||
|
||||
|
|
|
|||
|
|
@ -14,8 +14,8 @@ Therefore, this can be considered a stable release of Canoeboot.
|
|||
|
||||
This page lists all changes since Canoeboot 20241102.
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------------
|
||||
|
||||
<img tabindex=1 class="r" src="https://av.vimuser.org/x200-uboot.jpg" /><span class="f"><img src="https://av.vimuser.org/x200-uboot.jpg" /></span>
|
||||
|
||||
|
|
@ -34,8 +34,7 @@ and then a payload such as [SeaBIOS](https://www.seabios.org/SeaBIOS)
|
|||
or [GRUB](https://www.gnu.org/software/grub/) to boot your operating
|
||||
system; on ARM(chromebooks), we provide *U-Boot* (as a coreboot payload).
|
||||
|
||||
U-Boot UEFI payload on x86\_64
|
||||
------------------------------
|
||||
### U-Boot UEFI payload on x86\_64
|
||||
|
||||
For Canoeboot 20241207, today's release, U-Boot is *also* provided as an
|
||||
optional coreboot payload on x86 machines. This provides a sensible UEFI
|
||||
|
|
@ -51,14 +50,13 @@ Since this is based on a stable release, not much has changed; the focus has
|
|||
been on bug fixes. However, the U-Boot x86 payload is a notable new feature.
|
||||
|
||||
Summarised list of changes
|
||||
==========================
|
||||
-------------------------
|
||||
|
||||
<img tabindex=1 class="r" src="https://av.vimuser.org/uboot-canoe.png" /><span class="f"><img src="https://av.vimuser.org/uboot-canoe.png" /></span>
|
||||
|
||||
Changes are in order per category, from newest to oldest:
|
||||
|
||||
Feature changes
|
||||
---------------
|
||||
### Feature changes
|
||||
|
||||
* U-Boot support, for both x86 and x86\_64, provided as a coreboot payload.
|
||||
This complements the existing ARM64 U-Boot support present in Canoeboot.
|
||||
|
|
@ -66,16 +64,14 @@ Feature changes
|
|||
timeout for the first selected entry on the bootflow menu (upstream does
|
||||
not currently support this feature, at the time of this Canoeboot release).
|
||||
|
||||
Configuration changes
|
||||
---------------------
|
||||
### Configuration changes
|
||||
|
||||
* Enabled the serial console by default, on these machines: Thinkpad X60, T60.
|
||||
* U-Boot x86 enabled on almost every x86 board, chainloaded from SeaBIOS.
|
||||
The `seauboot` images boot directly into U-Boot first, from SeaBIOS, but
|
||||
U-Boot can be bypassed by using the ESC menu in SeaBIOS.
|
||||
|
||||
Bug fixes
|
||||
---------
|
||||
### Bug fixes
|
||||
|
||||
* `script/trees`: reset `PATH` per target, to avoid it being wrong in the next
|
||||
target, because we manipulate this when enabling cross compilation (by using
|
||||
|
|
@ -100,8 +96,7 @@ Bug fixes
|
|||
payload.
|
||||
* Added `arm-none-eabi-gcc-cs-c++` to Fedora dependencies.
|
||||
|
||||
Revision updates
|
||||
================
|
||||
### Revision updates
|
||||
|
||||
* Updated U-Boot to v2024.10, on both ARM64 and x86 boards.
|
||||
* Bumped coreboot/next to the latest coreboot revision, from several days
|
||||
|
|
@ -109,7 +104,7 @@ Revision updates
|
|||
OptiPlex 780 ports.
|
||||
|
||||
Git log
|
||||
=======
|
||||
-------
|
||||
|
||||
This git log covers all changes in this audit, relative to Canoeboot 20241102.
|
||||
|
||||
|
|
|
|||
|
|
@ -14,8 +14,8 @@ January 2025. Therefore, this can be considered a stable release of Canoeboot.
|
|||
|
||||
This page lists all changes since Canoeboot 20241207.
|
||||
|
||||
Introduction
|
||||
============
|
||||
Open source BIOS/UEFI firmware
|
||||
------------------------
|
||||
|
||||
<img tabindex=1 class="r" src="https://av.vimuser.org/x200-uboot.jpg" /><span class="f"><img src="https://av.vimuser.org/x200-uboot.jpg" /></span>
|
||||
|
||||
|
|
@ -36,10 +36,9 @@ system; on ARM(chromebooks), we provide *U-Boot* (as a coreboot payload).
|
|||
Experimental x86 U-Boot support is also available.
|
||||
|
||||
Summarised list of changes
|
||||
==========================
|
||||
--------------------
|
||||
|
||||
Board support
|
||||
-------------
|
||||
### Board support
|
||||
|
||||
RP2530 devices now supported in `pico-serprog`, e.g. Raspberry Pi Pico 2.
|
||||
|
||||
|
|
@ -50,8 +49,7 @@ The documentation has been updated, to reflect this improvement. Canoeboot also
|
|||
now imports `picotool` which is now used to compile the UF2 binaries for
|
||||
installation, when building them from `pico-sdk`.
|
||||
|
||||
Revision updates
|
||||
----------------
|
||||
### Revision updates
|
||||
|
||||
In descending order from latest changes to earliest changes:
|
||||
|
||||
|
|
@ -66,8 +64,7 @@ In descending order from latest changes to earliest changes:
|
|||
* Bumped flashprog to revision eb2c041 (14 Nov 2024). This brings in several
|
||||
important fixes from upstream.
|
||||
|
||||
Feature changes
|
||||
---------------
|
||||
### Feature changes
|
||||
|
||||
In descending order from latest changes to earliest changes:
|
||||
|
||||
|
|
@ -89,16 +86,14 @@ In descending order from latest changes to earliest changes:
|
|||
on any boards, nor will it be, on release images, but the user can do it
|
||||
themselves when compiling from source.
|
||||
|
||||
Configuration changes
|
||||
---------------------
|
||||
### Configuration changes
|
||||
|
||||
In descending order from the latest changes to the earliest changes:
|
||||
|
||||
None of note; some other entries in this release log could be considered
|
||||
configuration changes.
|
||||
|
||||
Bug fixes
|
||||
---------
|
||||
### Bug fixes
|
||||
|
||||
Several fixes were made to prevent build errors on the latest Debian Sid
|
||||
and Arch, as of 6 January 2025. Fedora 41 was also tested, fixing
|
||||
|
|
@ -178,8 +173,7 @@ changes to the earliest changes):
|
|||
because otherwise GRUB prefers the memdisk one and adding one in CBFS
|
||||
didn't change the background image, when users attempted this.
|
||||
|
||||
General code cleanup
|
||||
--------------------
|
||||
### General code cleanup
|
||||
|
||||
In descending order from the latest changes to the earliest changes:
|
||||
|
||||
|
|
@ -189,7 +183,7 @@ In descending order from the latest changes to the earliest changes:
|
|||
improvement).
|
||||
|
||||
Git log
|
||||
=======
|
||||
-------
|
||||
|
||||
This log is relative to Canoeboot 20241207:
|
||||
|
||||
|
|
|
|||
|
|
@ -26,8 +26,8 @@ Policy* on 17 November 2022, but Libreboot has existed since December 2013.
|
|||
Canoeboot started in October 2023, because of a minority of users that still
|
||||
demanded such a project exist as the old Libreboot did.
|
||||
|
||||
Introduction
|
||||
============
|
||||
Free as in freedom!
|
||||
-----------------
|
||||
|
||||
Canoeboot intentionally *de-blobs* coreboot, which is to say that it does not
|
||||
include binary blobs. The coreboot software otherwise requires binary blobs on
|
||||
|
|
@ -43,7 +43,7 @@ they are removed. You can also read more about the de-blobbing process
|
|||
on the [about](../about.md) page.
|
||||
|
||||
Background information
|
||||
======================
|
||||
----------------------
|
||||
|
||||
Canoeboot concerns itself only with what goes in the main boot flash IC, but
|
||||
there are other pieces of firmware to take into consideration, as covered
|
||||
|
|
@ -62,7 +62,7 @@ supports a handful of machines from coreboot.
|
|||
For information about Intel Management Engine and AMD PSP, refer to the FAQ.
|
||||
|
||||
So what *is* Canoeboot's policy?
|
||||
================================
|
||||
-------------------------
|
||||
|
||||
Canoeboot follows a very conservative and *light touch* approach, when it comes
|
||||
to deblobbing coreboot.
|
||||
|
|
@ -108,7 +108,7 @@ not with free software. Other examples of firmware outside of the main boot
|
|||
flash is covered in the Canoeboot FAQ.
|
||||
|
||||
More detailed insight about microcode
|
||||
=====================================
|
||||
---------------------------------
|
||||
|
||||
To be clear: it is preferable that microcode be free. The microcode on Intel
|
||||
and AMD systems *are* non-free. Facts and feelings rarely coincide; the
|
||||
|
|
|
|||
|
|
@ -3,8 +3,8 @@ title: Other coreboot distributions
|
|||
x-toc-enable: true
|
||||
...
|
||||
|
||||
Introduction
|
||||
============
|
||||
What is a coreboot distro?
|
||||
--------------------------
|
||||
|
||||
Canoeboot is a *coreboot distribution* or *coreboot distro*, in the same way
|
||||
that Debian is a *Linux distro*. Its purpose is to provide free/opensource boot
|
||||
|
|
@ -28,13 +28,12 @@ It's thanks to the various coreboot distros that many people use coreboot today;
|
|||
without them, many otherwise non-technical users might not use coreboot at all.
|
||||
|
||||
List of coreboot distros
|
||||
========================
|
||||
------------------------
|
||||
|
||||
Not all distros are listed; only those of high quality or otherwise of interest;
|
||||
quality, not quantity. In alphabetical order:
|
||||
|
||||
Dasharo
|
||||
-------
|
||||
### Dasharo
|
||||
|
||||
Website: <https://docs.dasharo.com/>
|
||||
|
||||
|
|
@ -52,8 +51,7 @@ the Dasharo project, and later upstreamed into the regular coreboot project.
|
|||
Dasharo has a special emphasis on commercial application, providing tailored
|
||||
coreboot images for each supported mainboard, with an emphasis on stability.
|
||||
|
||||
Heads
|
||||
-----
|
||||
### Heads
|
||||
|
||||
Website: <https://osresearch.net/>
|
||||
|
||||
|
|
@ -77,8 +75,7 @@ ROM hashes on every build; for this purpose, it also auto-downloads vendor
|
|||
files such as Intel ME at build time, instead of requiring you to dump from
|
||||
the original boot firmware.
|
||||
|
||||
Libreboot
|
||||
---------
|
||||
### Libreboot
|
||||
|
||||
Website: <https://libreboot.org/>
|
||||
|
||||
|
|
@ -117,8 +114,7 @@ are in fact advised to use *Libreboot*, not Canoeboot. Canoeboot is meant only
|
|||
as a proof of concept, and/or for purists who absolutely wish to have the purest
|
||||
free software experience possible, regardless of these facts.
|
||||
|
||||
MrChromeBox
|
||||
-----------
|
||||
### MrChromeBox
|
||||
|
||||
Website: <https://docs.mrchromebox.tech/>
|
||||
|
||||
|
|
@ -154,8 +150,7 @@ the interview:
|
|||
Libreboot largely avoids supporting Chromebooks, precisely because
|
||||
MrChromebox is a perfectly viable option on these machines.
|
||||
|
||||
Skulls
|
||||
------
|
||||
### Skulls
|
||||
|
||||
Git repositories: <https://github.com/merge/skulls>
|
||||
|
||||
|
|
@ -171,8 +166,7 @@ aims to provide ease of use while also providing great power and flexibility.
|
|||
So Libreboot is aimed specifically at power users, while also trying to
|
||||
accomodate non-technical users; Skulls largely targets the latter.
|
||||
|
||||
System76 Open Firmware
|
||||
----------------------
|
||||
### System76 Open Firmware
|
||||
|
||||
Git repository: <https://github.com/system76/firmware-open>
|
||||
|
||||
|
|
@ -187,7 +181,7 @@ System76 provides the coreboot firmware, along with EDK2 UEFI payload. It can
|
|||
boot Linux distros, BSD systems and even Windows perfectly.
|
||||
|
||||
Is your distro unlisted?
|
||||
========================
|
||||
------------------------
|
||||
|
||||
Please get in touch! We'd love to link your project here.
|
||||
|
||||
|
|
@ -203,7 +197,7 @@ firmware, which was the primary motivation behind this page, in promoting the
|
|||
various projects.
|
||||
|
||||
Non-coreboot free firmware
|
||||
==========================
|
||||
--------------------------
|
||||
|
||||
Several other projects besides coreboot provide free hardware initialisation,
|
||||
such as [U-Boot](https://www.u-boot.org/) (as own firmware, distinct from U-Boot
|
||||
|
|
|
|||
|
|
@ -93,7 +93,7 @@ $return$
|
|||
$endif$
|
||||
$if(toc)$
|
||||
<nav id="$idprefix$TOC">
|
||||
<h1>Navigate this page:</h1>
|
||||
<h2>Navigate this page:</h2>
|
||||
$toc$
|
||||
</nav>
|
||||
$endif$
|
||||
|
|
|
|||
|
|
@ -93,7 +93,7 @@ $return$
|
|||
$endif$
|
||||
$if(toc)$
|
||||
<nav id="$idprefix$TOC">
|
||||
<h1>Navigate this page:</h1>
|
||||
<h2>Navigate this page:</h2>
|
||||
$toc$
|
||||
</nav>
|
||||
$endif$
|
||||
|
|
|
|||
|
|
@ -93,7 +93,7 @@ $return$
|
|||
$endif$
|
||||
$if(toc)$
|
||||
<nav id="$idprefix$TOC">
|
||||
<h1>Sfoglia questa pagina:</h1>
|
||||
<h2>Sfoglia questa pagina:</h2>
|
||||
$toc$
|
||||
</nav>
|
||||
$endif$
|
||||
|
|
|
|||
|
|
@ -93,7 +93,7 @@ $return$
|
|||
$endif$
|
||||
$if(toc)$
|
||||
<nav id="$idprefix$TOC">
|
||||
<h1>Навігація цією сторінкою:</h1>
|
||||
<h2>Навігація цією сторінкою:</h2>
|
||||
$toc$
|
||||
</nav>
|
||||
$endif$
|
||||
|
|
|
|||
|
|
@ -93,7 +93,7 @@ $return$
|
|||
$endif$
|
||||
$if(toc)$
|
||||
<nav id="$idprefix$TOC">
|
||||
<h1>本页导航:</h1>
|
||||
<h2>本页导航:</h2>
|
||||
$toc$
|
||||
</nav>
|
||||
$endif$
|
||||
|
|
|
|||
Loading…
Reference in New Issue